Using the Navigation Files Plugin
Navigation uncertainties are directly related to your GPS receiver’s navigation accuracy. Using Prediction Support Files (PSFs), you can model your navigation accuracy with higher fidelity. PSFs provide statistical error data for both GPS ephemeris and satellite clock errors. Knowing these uncertainties helps provide a better prediction of your GPS receiver’s accuracy. STK has the ability to use this data from the Navigation Accuracy Figure of Merit properties page. This plugin helps fill that data in, and uses the best data for the scenario time period. Additionally, this plugin can scale the data to achieve a desired level of confidence in the results.
You can access the plugin in two different ways – you can use the Navigation Uncertainties button on the Navigation Files Support toolbar, or it can be accessed by right-clicking on a Figure of Merit that is configured as a Navigation Accuracy FOM.
The Navigation Files Support toolbar looks like this:

The left button is the Navigation Uncertainties tool. To access the plugin from a Navigation Accuracy FOM, right-click on the FOM, select FigureOfMerit Plugins, then select Add Navigation Uncertainties.

Note that if your FOM is not a Navigation Accuracy type, the plugin will not appear as an option.

Select Data
Once opened, you can select to use a Prediction Support File (PSF), which contain the GPS satellite errors, from either a web service (if you are connected to the internet) or from a file locally. Notice the red note indicating that data is not loaded initially.
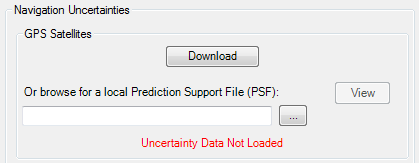
If you do not have a PSF file, the AGI GPS Satellite Performance page has links to the AGI-created PSF files.
You can use your own RMS values. Simply download a PSF file from the link above and replace the “URE=” value in each PSF file’s PSF_RECORD with your own values for each GPS satellite. The SVID attribute in the PSF file corresponds to the GPS Satellite’s PRN number.
View
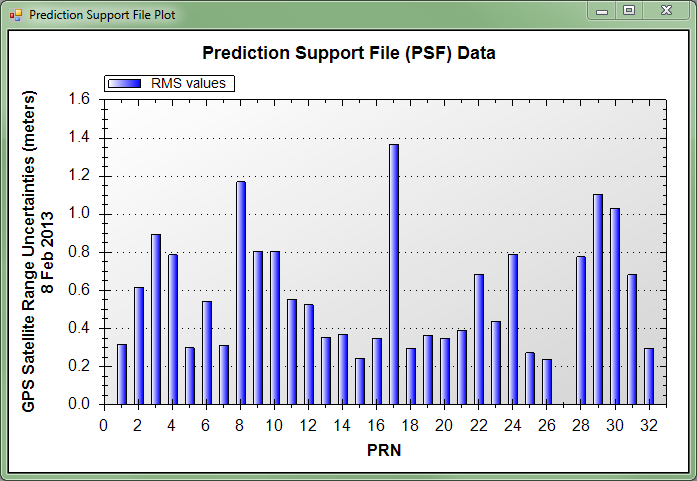
Once identified, you can click the View button to display a bar graph of the loaded PSF file.

The graph below shows the values of the User Range Error contained in the PSF file. These Root-Mean-Square (RMS) values represent the combined GPS ephemeris and clock uncertainties necessary for the FOM calculation. Since these are RMS values, the resulting navigation error predictions are also RMS values. Scaling these RMS values leads to a better understanding of error confidence. See the scaling option below.
Once you are finished viewing the PSF data, close the graph window.
Receiver Uncertainty
Next, decide what value to use for your Receiver’s uncertainty. If you are unsure, one meter is a reasonable default value. Note that this value will also be scaled if scaling is selected.

Scaling
You can scale the data to a specific confidence value if you choose.
Scaling to 95% for example, produces larger uncertainties and consequently larger navigation errors. However those navigation errors now represent a 95% confidence level. Without scaling, the confidence level of the navigation accuracy FOM results would vary, depending on what type of FOM options you have chosen. With scaling, the FOM results are all presented with a consistent confidence level.
Note that the scaling option is not allowed for the GACC navigation accuracy FOM type. If a GACC type is selected, a warning message will be given noting this.
Select FOMs
Once the uncertainties are defined, select which Navigation FOMs should be updated with these uncertainty values. Note that only the FOMS in your scenario that are configured as Navigation Accuracy FOMS will be displayed in this list. The FOMS are listed using their coverage definition / FOM name. Check each FOM to which you would like the uncertainties applied. Note that if you opened this tool by right-clicking on a FOM, that FOM will already be selected for you.
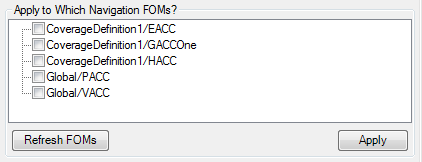
If you have added or removed FOM definitions from your scenario, click the Refresh FOMs button to re-populate the selections.
Click the Apply button to configure those FOMS to use the uncertainty data. A message will appear noting that the assets uncertainties have been updated. Additionally, warning or notification messages may also appear. Note that you may click OK instead of Apply. This will apply the uncertainties and then close the window.
Troubleshooting
Some things to consider when using the Navigation Files UI Plugin
- The plugin requires one of the following:
- Satellites used as assets in the coverage definition must be defined to use a GPS propagator.
- Default names of the GPS satellites must be used.
To determine the correct object to assign the uncertainty value to, the plugin requires one of the above to be true.
Note that the identification of the correct object is based on the PRN assigned to the object, which is matched to the SVID value in the PSF.
- When choosing a GACC type for the navigation accuracy FOM, scaling is not enabled. The GACC type combines time and ephemeris uncertainties and is not supported for scaling.
- Currently, the Navigation Files Plugin cannot be used with single object coverage.
The GPS Satellite Outage Tool
Satellite Outage Files (SOFs) provide information about GPS satellite outages. Taking these outages into account is crucial for obtaining an accurate navigation error prediction. Without considering outages, your navigation errors may be smaller than actually observed. The SOF provides GPS outage information for historical, current and predicted outages. The historical outages go back to 1998. The US Air Force produces a new SOF each time a new outage is completed, experienced or predicted. Using the GPS satellite outage tool will add all appropriate GPS satellite outages to your scenario.
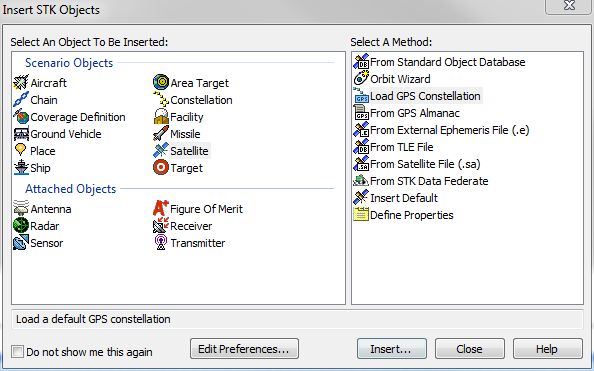
Before using the GPS Satellite Outage tool, you must have a Constellation object in your scenario containing the GPS satellites. Loading the GPS satellites from the Load GPS Constellation option on the Insert STK Objects dialog (shown below), will automatically create the constellation object for you.
On the Navigation Files Support toolbar, select the GPS satellite outage tool – the right-most button:
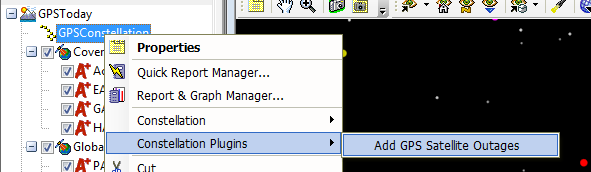
You can also load GPS satellite outage data by right-clicking on a constellation object and selecting the Constellation Plugins, then Add GPS Satellite Outages option.
Select Outage Data
When the tool is displayed you may select to download outage data (if connected to the internet) or you may select to load a SOF file locally.

Select a Constellation
Once the outage data is loaded, select which constellation to which the data should be applied.
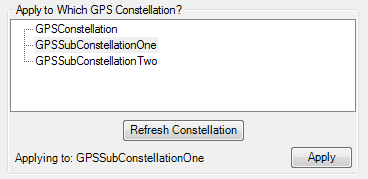
If you have a constellation object selected, or opened the GPS satellite outage tool by right-clicking on a constellation object, that constellation will already be selected. Once selected, click the Apply button to apply any outages in the SOF data to your scenario. Note that you may click OK instead of Apply. This will apply the outages and then close the window. If you have added or deleted constellation objects in your scenario, click the Refresh Constellation button to re-populate the selections.
The outages for your scenario are determined by your scenario’s time frame. Once applied, the textbox at the bottom of the tool will list any outages for your scenario.

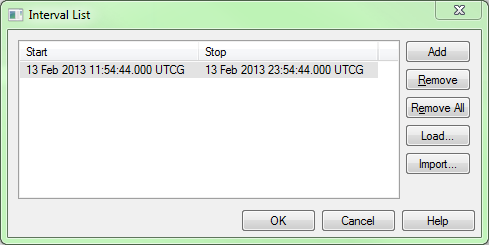
The GPS satellite outage tool creates interval files for each satellite that has an outage in the SOF, for the duration of the scenario time period. Once applied, you can view the outages by selecting a satellite for which an outage was applied, then opening its Properties. On the properties screen, scroll to the Constraints section and click the Temporal link. You’ll notice that Intervals have been set to Use and the action has been set to Exclude.

An Interval File has been created with all of the outages for that particular satellite for the scenario’s timespan. Click the Edit List … button to see the outage times.
Troubleshooting
Some things to consider when using the GPS Satellite Outage Tool:
- The SOF tool requires one of the following for an outage to be applied:
- Satellites used as assets in the coverage definition must be defined to use a GPS propagator.
- Default names of the GPS satellites must be used.
- The interval files are created with outage times that are specified relative to the scenario epoch as defined in the interval file. If the scenario’s epoch is changed after loading a SOF, the outages will not be accurate.
To determine the correct object to assign the outage to, the plugin requires one of the above to be true. If neither is true, that object is ignored.
Note that the identification of the correct object is based on the PRN assigned to the object, which is matched to the SVID value in the SOF.