Follow Sun RPO Sequence
The Follow Sun RPO sequence places the chase satellite between the target satellite and the apparent Sun.
First, the sequence moves the satellite from the current position to the starting point of the Follow Sun. The sequence does this through a set of forced-motion waypoints that, by default, move the chase in a near-straight line along the path connecting the current relative position to the start position of the Follow Sun. If you prefer a simple hop instead of a series of waypoints, set the Way_MaxDegrees parameter to a large value (>180 deg).
Second, the sequence maintains the Follow Sun configuration for the number of revolutions you specify.
You control the following:
- Distance maintained from the target
- Number of forced-motion points per rev
- Number of revolutions to maintain in the Follow Sun mode
- Lead (or lag) time relative to the Sun
You can use the lead time to either lead the Sun (positive values) or lag the Sun (negative values) so that the chase satellite is not exactly between the target satellite and the Sun.
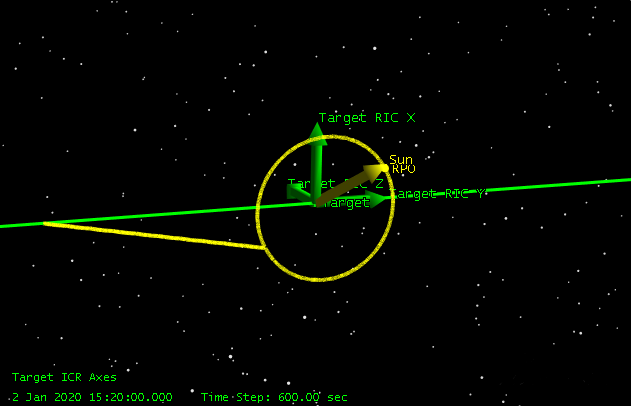
The following picture shows a Follow Sun sequence with a 300-meter standoff distance.
Sequence parameters
| Option | Description |
|---|---|
| Standoff_Dist | Enter the constant distance to maintain from the target in the direction of the Sun (apparent Sun). |
| NumPoints | Enter, as an integer, the number of points in the Follow Sun operation per revolution. |
| FS_NumRevs | Enter, as a double, the number of revolutions to persist in the Follow Sun configuration. |
| Transfer_Duration | Enter the transfer time from the current position to the start of the Follow Sun operation. |
| Way_MaxDegrees | Enter the maximum angle between hops for the forced motion part that connects current position to the start of the Follow Sun sequence. |
| Engine_Name | Enter, as a string, the name of the finite maneuver engine model. |
| Maneuver_Type | Select the type of maneuver, "Impulsive" or "Finite," from the drop-down list. |
| StopAtEnd | Enter, as a Boolean, whether to stop all relative motion at the end of the FMWaypoints sequence (True) or not (False). |
| WhoAmI | Enter, as a string, the name of the current satellite. |
| Sun_LeadTime | Enter the lead (positive values) or lag (negative values) time relative to the Sun. The result is to have the satellite leading or lagging the apparent Sun position so that the proximity operations satellite is not directly in the Sun line. |
| ThisSequence | Enter, as a string, the name of this sequence. This is nominally Follow Sun, but if you insert the sequence multiple times in the MCS, Astrogator adds a monotonically increasing number to the end of name (FollowSun1, FollowSun2, etc.). |