Perch Maximum Error RPO Sequence
The Perch Maximum Error RPO sequence maintains a perch point using the maximum error method. This sequence uses forced-motion waypoints to maintain the current relative position. This relative position, when not on the VBar, requires station-keeping maneuvers to remain there.
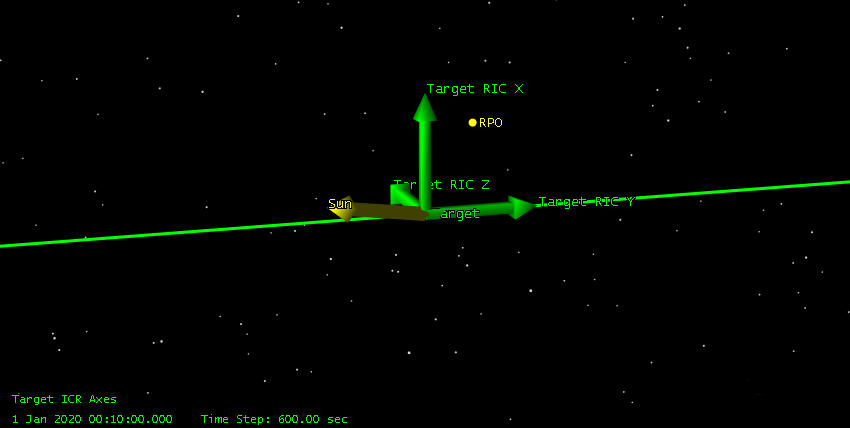
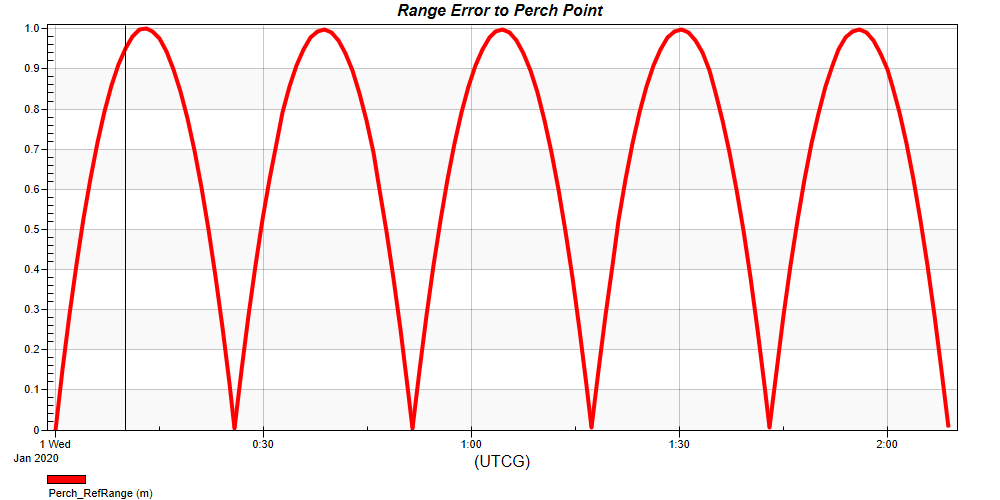
The following pictures show a perch point, relative to the target, at +200m radial/+200m in-track/+200m cross-track for two hours with Perch_MaxError set to 1 meter. This example requires five maneuvers and total Delta-V of 2.3 cm/sec.
Sequence Parameters
| Option | Description |
|---|---|
| Perch_Duration | Enter the duration of the perch you want to maintain. |
| Perch_MaxError | Enter the maximum distance error from the perch point. |
| Perch_Reference | Enter, as a string, the name of the reference satellite that has the ephemeris for the reference perch. The sequence generates the perch reference using the hold method. |
| Engine_Name | Enter, as a string, the name of the finite maneuver engine model. |
| Maneuver_Type | Select the type of maneuver, "Impulsive" or "Finite," from the drop-down list. |
| WhoAmI | Enter, as a string,the name of the current satellite. |
| Sequence_Name | Enter the name of this sequence as a string. This is nominally Perch_MaxError, but if you insert the sequence multiple times in the MCS, Astrogator adds a monotonically increasing number to the end of the name (Perch_MaxError1, Perch_MaxError2, etc.). |