Target Planning
The purpose of this example scenario is to highlight some of the advanced features of the Target Planner. The Landmapper BC scenario is also a good reference for target planning. The same LandmapperBC satellite configuration is used in this scenario.
There are three scans setup in this scenario. LineTargets "Scan1", "Scan2", and "Scan3" are included purely for reference. The Target Planner does not currently use these objects to configure scans; rather, the scans are determined by the other start and end points (i.e. "SS1" -> "SE1"). Feel free to use this scenario to play around with various Target Planning situations.
Target Planner Configuration
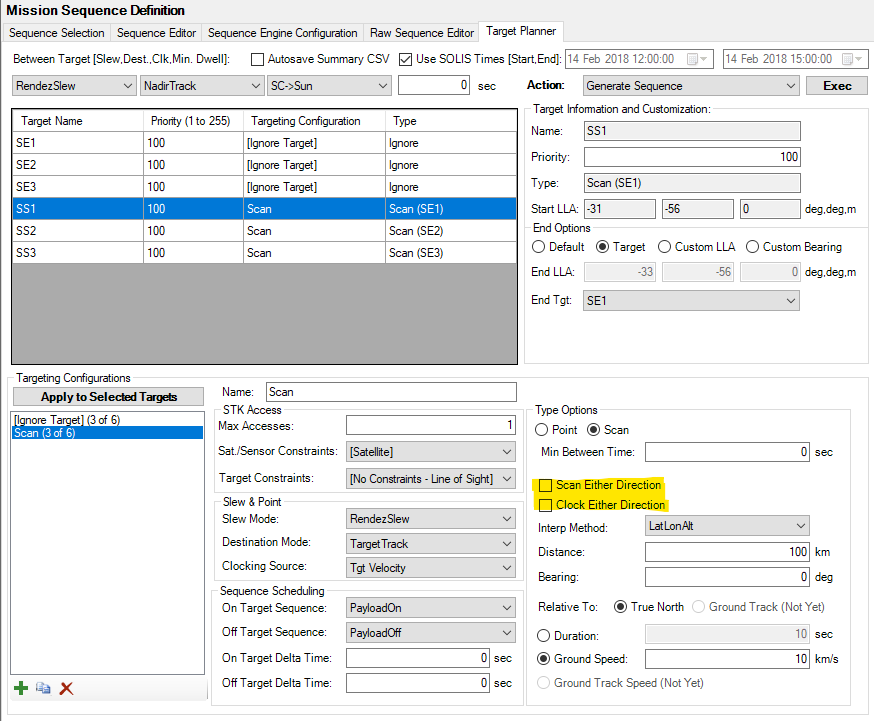
A Targeting Configuration called "Scan" is set up as follows:
- Sat./Sensor Constraints set to [Satellite], which uses any STK constraints from the SOLIS satellite.
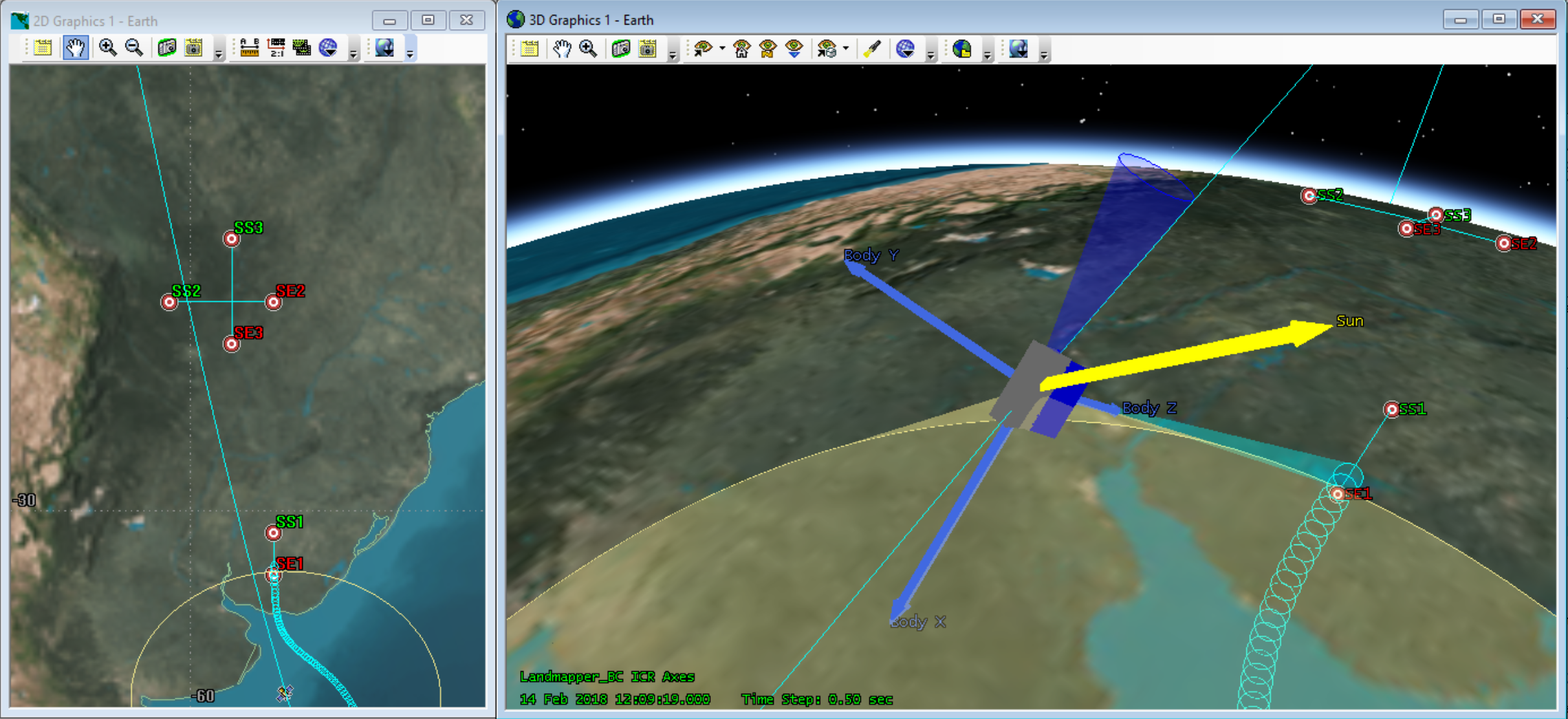
- The STK Constraints for the Landmapper BC satellite have been set to a minimum elevation of 45 degrees. This constraint is visually represented by the yellow Field of Regard sensor which is configured as 45 degree half-cone toward nadir. The Target Planner uses STK Access to determine when targets meet their accessibility constraints. In this case, the scans will not be scheduled unless they are within the yellow cone. You can see this in the image above.The LandmapperBC elevation constraint was used in this scenario instead of a sensor constraint. You can get a similar result by defining a "Fixed in Axes" sensor, with a 45 degree half cone, that will always face nadir. "Fixed in Axes" sensors are only available with an STKPro license, so the Field of Regard sensor had to be attached to another, non-slewing, satellite to make the visuals available to all users.
- The STK Constraints for the Landmapper BC satellite have been set to a minimum elevation of 45 degrees. This constraint is visually represented by the yellow Field of Regard sensor which is configured as 45 degree half-cone toward nadir. The Target Planner uses STK Access to determine when targets meet their accessibility constraints. In this case, the scans will not be scheduled unless they are within the yellow cone. You can see this in the image above.
- Destination Mode set to TargetTrack, which points the "Atlas Payload" at the Target Object. The Target Planner sets up the definition of the Target Object as the satellite scans.
- Clocking Source set to TgtVelocity, which is a vector in the direction of the scan. By choosing a BDY vector to align with this, scans can be completed with clocking relative to the scan.
- Type Options sections set to "default" parameters.
- These default parameters can be overwritten in the "End Options" section under Target Information and Customization. If the "End Option" radio button is set as Default, the scan will use the Type Options parameters to determine the End Point. Otherwise, EndPoints can be specified using another Target, a Custom Lat/Lon/Alt, or a Custom Bearing and Distance.
Forced Scan Direction
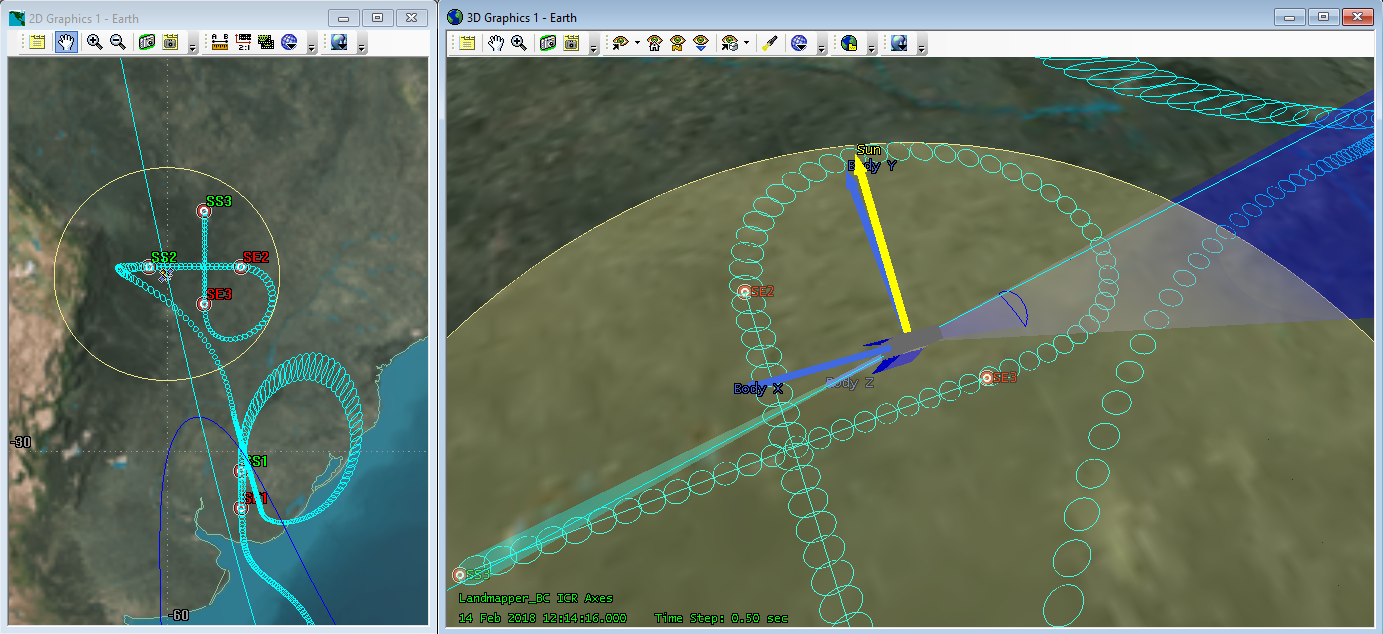
In the image below, the target planner must choose a route that scans each scan from start->end. By imposing this constraint, the Target Planner is not able to satisfy all three scans given the Access constraints.
Either Scan Direction
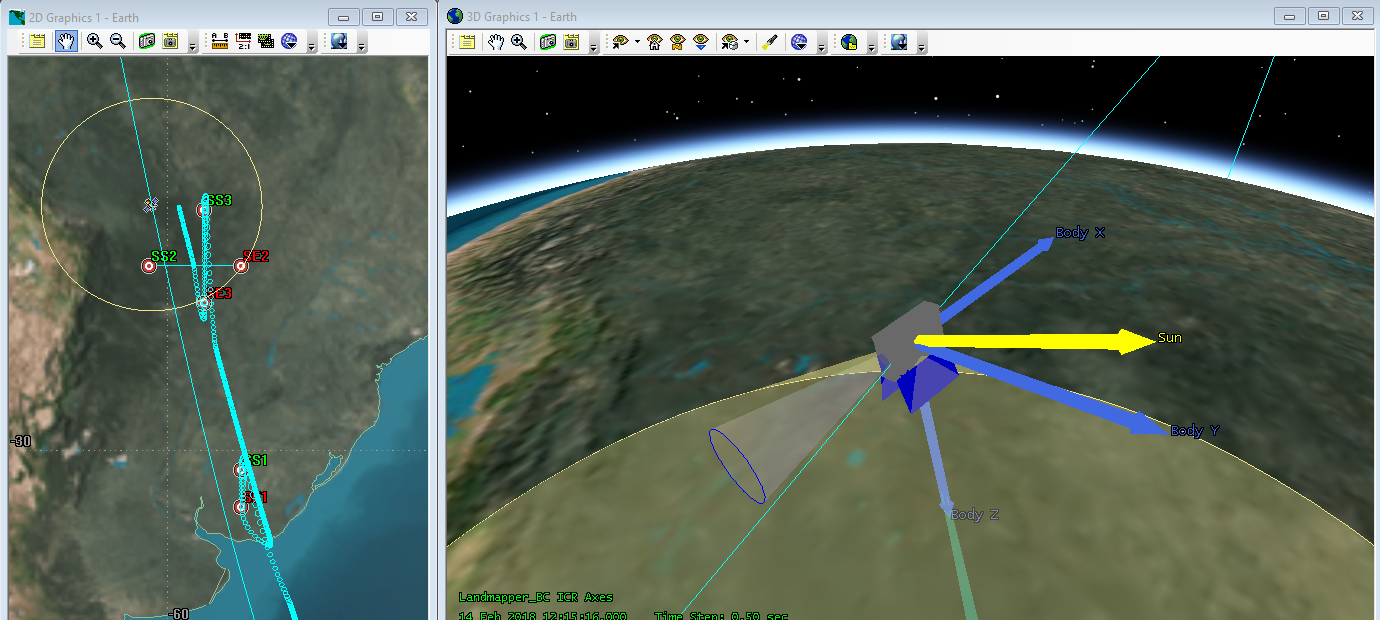
By allowing the scans and clocking to be performed in either direction, the target planner comes up with a much different result as shown in the image below. In this case, it is able to satisfy all three scans within the Access constraints.