RectangularPyramid Class |
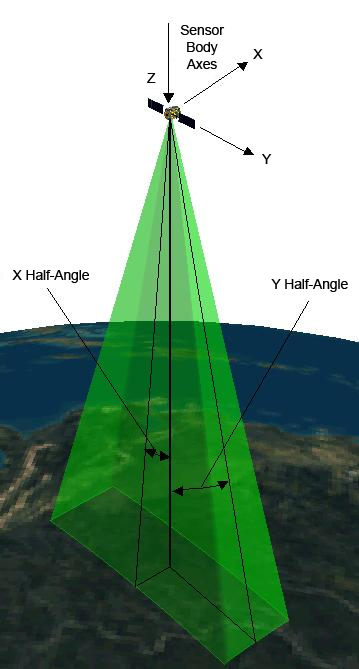
A sensor volume with a rectangular cross section and a radial range limit. The half angles define
the outer boundaries of the volume, and the radial range closes the volume, forming a sensor volume
in the shape of a rectangular pyramid.
SystemObject
AGI.Foundation.Geometry.ShapesFigure
AGI.Foundation.Geometry.ShapesSolid
AGI.Foundation.Geometry.ShapesSensorFieldOfView
AGI.Foundation.Geometry.ShapesRectangularPyramid
AGI.Foundation.Geometry.ShapesFigure
AGI.Foundation.Geometry.ShapesSolid
AGI.Foundation.Geometry.ShapesSensorFieldOfView
AGI.Foundation.Geometry.ShapesRectangularPyramid
Namespace: AGI.Foundation.Geometry.Shapes
Assembly: AGI.Foundation.Core (in AGI.Foundation.Core.dll) Version: 26.1.424.0 (26.1.424.0)
The RectangularPyramid type exposes the following members.
| Name | Description | |
|---|---|---|
| RectangularPyramid |
Constructs a volume with a default definition, in which the XHalfAngle and the
YHalfAngle are equal to HalfPi radians.
| |
| RectangularPyramid(Double, Double) |
Constructs a volume of infinite radius with the provided parameters.
| |
| RectangularPyramid(Double, Double, Double) |
Constructs a volume of limited radius with the provided parameters.
|
| Name | Description | |
|---|---|---|
| IsConnected |
Gets a value indicating whether the figure is connected.
(Overrides FigureIsConnected.) | |
| Radius |
Gets or sets the radial limit of the volume. This is the maximum range at which the sensor
can detect a target.
(Inherited from SensorFieldOfView.) | |
| XHalfAngle |
Gets or sets the half angle measured from the principal direction and in the direction of the x-axis.
| |
| YHalfAngle |
Gets or sets the half angle measured from the principal direction and in the direction of the y-axis.
|
| Name | Description | |
|---|---|---|
| Encloses |
Indicates if the provided point is inside the volume.
(Overrides SolidEncloses(Cartesian).) | |
| Equals | Determines whether the specified object is equal to the current object. (Inherited from Object.) | |
| Finalize | Allows an object to try to free resources and perform other cleanup operations before it is reclaimed by garbage collection. (Inherited from Object.) | |
| GetEnclosureDescriptions |
Gets the list of descriptions for the enclosure functions for this solid.
(Overrides SolidGetEnclosureDescriptions.) | |
| GetHashCode | Serves as the default hash function. (Inherited from Object.) | |
| GetProjection(Ellipsoid, KinematicTransformation) |
Gets the projection of the sensor onto the front surface of a specified ellipsoid and into space.
(Inherited from SensorFieldOfView.) | |
| GetProjection(Ellipsoid, KinematicTransformation, SensorProjectionOptions) |
Gets the projection of the sensor onto the front surface of a specified ellipsoid and onto a plane at a
specified distance in space.
(Overrides SensorFieldOfViewGetProjection(Ellipsoid, KinematicTransformation, SensorProjectionOptions).) | |
| GetService |
Gets the service object of the specified type.
(Inherited from SensorFieldOfView.) | |
| GetType | Gets the Type of the current instance. (Inherited from Object.) | |
| MemberwiseClone | Creates a shallow copy of the current Object. (Inherited from Object.) | |
| OnRadiusChanged |
Called after the Radius property changes.
(Overrides SensorFieldOfViewOnRadiusChanged.) | |
| ToString | Returns a string that represents the current object. (Inherited from Object.) |
The vertex of the volume is located at the origin and the sensor principal direction is along the positive z-axis. Half angles measured from the principal direction and in the direction of the x-axis and y-axis define the extent of the rectangular cross section. The range limit measured radially from the origin closes the volume.