Basic Point to Point
A Basic Point to Point procedure travels a straight line through 3D space from the end of the previous procedure to the site of the current procedure. That is, it smoothly accelerates/decelerates under a constant climb/descent to arrive at the specified speed, altitude, and . Using basic point to point, the aircraft uses the cruise performance model to determine speed and fuel flow. When altitude and push/pull radii can’t satisfy performance and flight path constraints specified by the user, extra maneuvers are inserted at the beginning of the procedure. The aircraft always achieves the specified speed and altitude, but may require extra maneuvers such as circle climbs to accomplish this.
Basic point to point should be used to reflect visual flight rules, tactical/combat situations, or building a flight path that can use Arc-Line-Arc geometry. Enroute should be used for instrument flight rules or other controlled navigation, or when the flight path calls for climb or descent to constant altitude cruise.
The procedure contains one control point - the procedure site - as indicated in the diagram below.
The basic point to point procedure does not use climb or descent performance models to compute trajectory or fuel burn. It uses only the cruise performance model for the numbers. The basic point to point profile mode plays a central role in how the speed is generated along the trajectory. The Immediate Change mode commands a speed change to what the cruise performance model says is the Steady state cruise airspeed for the altitude and then hold the appropriate steady state speed for the remainder of the procedure.
The Gradual Change mode looks at the final altitude and gets the cruise performance model steady state speed for that altitude. In this case it uses the Max Performance airspeed. It then performs a linear interpolation along the trajectory using the airspeed type (, , etc) as the basis for that linear interpolation along the profile. Both the Immediate and the Gradual change modes make use of the Cruise Airspeed Type selection on the Basic Point to Point interface when generating the speed to fly along the profile.
For Fuel Flow, the Basic Point to Point ignores fuel flow associated with the Max Performance Airspeed because that can conflict with the fuel flow at other speeds that might arise during the profile.
Altitude
Altitude parameters define the altitude that the aircraft will attempt to achieve and sustain during the procedure.
Table - Altitude Parameters
| Parameter |
Description
|
| Use Aircraft Default Cruise Altitude
|
Select this check box to define the altitude of the procedure using the default cruise altitude specified in the currently selected cruise performance model.
|
| Altitude
|
If Use Aircraft Default Cruise Altitude is not selected, select an altitude reference (AGL or MSL) and then define the aircraft's altitude for the procedure.
The altitude is constrained by the lowest ceiling value of the active performance models in the current mission phase. |
Navigation Options
Navigation Options parameters define the heading or course of the aircraft at the beginning of the procedure and the direction of turns taken to arrive at the procedure site.
Table - Navigation Options Parameters
| Parameter |
Description
|
| Nav Mode |
The heading or course of the aircraft at the beginning of the procedure. Select from the following options:
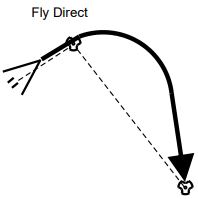
- Fly Direct - The aircraft will fly directly to the procedure site from the end of the previous procedure, turning as necessary.
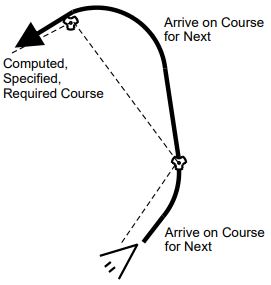
- Arrive on Course for Next Procedure - The aircraft will start or arrive at the procedure site on a course determined by the next procedure so as to avoid an immediate turn correction by the next procedure.
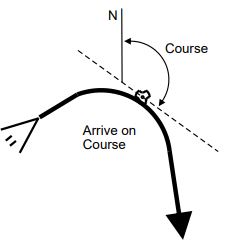
- Arrive on Course - The aircraft will start or arrive at the procedure site on a specific course. The course and then specify a True or Magnetic north reference using the drop-down menu.
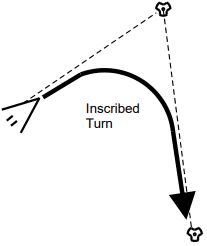
- Inscribed Turn - The aircraft will perform an inscribed turn, placing it on a course to the first control point of the next procedure at a point no further than half of the distance to that waypoint. The aircraft will attempt to adhere to the Turn Factor, but will reduce that value if needed to ensure that it does not arrive on the final course beyond the halfway mark. Similarly, the aircraft may violate the acceleration performance model to ensure that it completes the turn in the proper distance; in the event that the model is violated, information will be displayed in the Message Viewer. When performing an inscribed turn, the aircraft will not pass over the current procedure's site unless the turn radius is zero.
- Arrive on Heading into Wind - The aircraft will start or arrive at the procedure site on a heading into the wind.
|
| First Turn |
The direction of the turn made from the end of the previous procedure as the aircraft sets its course toward the procedure site. If the selected Nav Mode does not include a turn, then this parameter will be ignored. Select from the following options:
- Automatic - STK's Aviator capability will determine the direction of the turn.
- Turn Left - Specifies a left turn.
- Turn Right - Specifies a right turn.
|
| Second Turn |
The direction of the turn made to achieve the outbound course at the procedure site. If the selected Nav Mode does not include a turn, then this parameter will be ignored. Select from the following options:
- Automatic - Aviator will determine the direction of the turn.
- Turn Left - Specifies a left turn.
- Turn Right - Specifies a right turn.
|
Enroute Options
Enroute Options define the turning performance characteristics of the aircraft during enroute segments of the procedure.
Table - Enroute Options Parameters
| Option |
Description |
| Use Max Speed When Computing Turn Radii |
Select this check box to force the aircraft to maintain its cruise speed when turning, even if doing so will result in the aircraft making a turn large enough that it takes longer to complete than it would complete a slower, smaller turn. |
| Turn Factor
|
The Turn Factor is the maximum amount - expressed as a multiplier - that the turn radius will be increased to minimize the bank angle required to complete the turn. The factor is applied only to turns that are performed enroute to the procedure's first control point. The full circles that correspond (or are tangent) to the start/stop turns at the extended radius may not intersect if the factor is set high enough. This parameter is a limit and may not actually be achieved due to the requirement to generate an appropriate turn sequence. You can adjust the slider or enter the value manually in the box, with the minimum value being 1 and the maximum value being 10. |
Enroute Cruise Airspeed
Enroute Cruise Airspeed parameters define the airspeed performance characteristics of the aircraft during enroute segments of the procedure.
Table - Enroute Cruise Airpseed Parameters
| Parameter |
Description |
| Airspeed Type |
Select the method for determining the airspeed from the following options:
- Minimum Airspeed - constant airspeed at the minimum cruising airspeed for the aircraft.
- Max Endurance Airspeed - variable airspeed that maximizes the length of time that the aircraft can remain in flight.
- Max Range Airspeed - variable airspeed that maximizes the distance that the aircraft can fly.
- Max Performance Airspeed – a custom performance airspeed and fuel flow that you can use to model specific flight conditions.
- Maximum Airspeed - constant airspeed at the maximum cruising airspeed for the aircraft.
- Other Airspeed - constant, manually defined airspeed.
With the exception of Other Airspeed, the actual airspeed will be defined by the currently selected cruise performance model, or possibly by the currently selected climb or descent performance model if the aircraft is climbing or descending.
|
| Airspeed |
Displays the airspeed. If the airspeed type is Other Airspeed, enter the desired airspeed value; otherwise, the calculated value will be displayed and cannot be edited. Select a reference from the drop-down menu - true airspeed (TAS), calibrated airspeed (), equivalent airspeed (EAS), or number. |
| Airspeed Profile |
Select a method for attaining the procedure's cruise airspeed from the following options:
- Fly cruise airspeed profile (immediate change) - the aircraft adopts the selected cruise airspeed at the beginning of the procedure
- Arrive on cruise airspeed (gradual change) - the aircraft begins accelerating or decelerating in the previous procedure so that it arrives at the beginning of the procedure at the selected cruise airspeed.
|
Vertical Plane Options
Vertical Plane Options parameters define the flight path angle of the aircraft during enroute and arc segments of the procedure.
| Parameter |
Description |
| Final Flight Path Angle |
The pitch angle of the flight path at the end of the procedure. |
| Radius Factor |
The Radius Factor is the maximum amount - expressed as a multiplier - that the radius of a vertical curve will be increased to minimize the flight path angle required to complete it. The full circles that correspond (or are tangent) to the start/stop curves at the extended radius may not intersect if the Radius Factor is set high enough. This parameter is a limit and may not actually be achieved due to the requirement to generate an appropriate curve sequence. You can adjust the slider or enter the value manually in the box, with the minimum value being 1 and the maximum value being 10. |
| Min Enroute FPA |
The minimum pitch angle of the flight path during enroute segments of the procedure. |
| Max Enroute FPA |
The maximum pitch angle of the flight path during enroute segments of the procedure. |