Computational Settings
In addition to the object pair and each object’s active constraints, other settings configured within the access determine the computed access times:
- Time interval
- Signal path
- Light time delay
- Aberration
- Sampling
- Event detection
Default values for many of the settings are in Edit -> Preferences -> Access Defaults.
Time interval
Normally, STK computes access over object times, the times when both objects are available. However, you may specify an input interval (or intervals) that further restrict the access times.
Signal path
In many situations, you want to compute access to answer a question involving light reception or RF signal transmission, both of which are subject to the physical effects of relativity. STK provides a simple model of special relativity that models the light time delay of signals and the effects of aberration. It does not model general relativity. For a discussion of the light time computation, including terminology and equations, see the Light Time Delay Apparent Position.
Light time delay
The use of light time delay and aberration affects the computation of constraint metrics; its value depends on the relative position between the pair of objects involved in the access. Let A and B denote the object pair of an access. STK computes the relative position, before applying aberration, in one of the following ways:
- Light time delay not modeled
- Relative_position(t) = position_B(t) – position_A(t)
- Light time delay modeled
- A acting as signal transmitter, B acting as signal receiver, clock time t associated with A
- Relative_position(t) = position_B(t+Δt) – position_A(t)
- A acting as signal transmitter, B acting as signal receiver, clock time t associated with B
- Relative_position(t) = position_B(t) – position_A(t-Δt)
- A acting as signal receiver, B acting as signal transmitter, clock time t associated with A
- Relative_position(t) = position_B(t-Δt) – position_A(t)
- A acting as signal receiver, B acting as signal transmitter, clock time t associated with B
- Relative_position(t) = position_B(t) – position_A(t+Δt)
Here Δt represents the (positive) light time delay between the objects. STK must calculate it iteratively by solving for the value of Δt that makes the magnitude of the vector Relative_position(t) equal to c*Δt, with c being the speed of light. This models the signal motion as a straight line1.
Modeling light time delay introduces the following new concepts:
- Signal sense
- One object acts as the transmitter of the signal, the other as the receiver.
- Clock host
- The value of time that is reported in the access times is associated with the location of one of the objects, either A or B.
- You can consider time as the time of reception or the time of transmission, as appropriate for the signal sense of the clock host.
Aberration
Aberration is the change in the perceived direction of the signal caused by the observer’s own motion. STK uses the simple Newtonian approximation formula for computing the effects of aberration, rather than the more precise Lorentz formula appropriate for special relativity. The approximation only incorporates the ratio v/c, with v being the object’s inertial speed and c being the speed of light, and ignores terms of order (v/c)2 and higher.
STK supports three settings for aberration:
- None
- STK ignores aberration entirely.
- Annual
- STK includes aberration caused by the motion of the observer’s central body moving in the solar system, when the target object’s central body is not the same as the observer’s.
- STK ignores aberration when both objects in the access pair refer their location to the same central body. An example would be computing access from an Earth-based Facility to an Earth-orbiting Satellite.
- STK includes aberration for Stars, Planets, and objects located on other central bodies. An example would be computing access from an Earth-based Facility to a Moon-orbiting Satellite.
- Total
- STK includes aberration caused by the motion of the observer.
- STK will still include aberration even though both objects are based at the same central body.
The default setting is Annual, meaning that STK will ignore aberration unless the central bodies for the objects involved in the access are different or one object is a Planet or Star.
Sampling
STK computes satisfaction times for a constraint by sampling the constraint’s value over time and then searching for times when the constraint’s condition is just barely satisfied.
For the case of any min/max constraint, the search finds the times when the constraint’s value equals the min/max value setting of the constraint. For example, for an elevation angle constraint with a minimum value set to 5 degrees, STK searches for times when the elevation angle becomes 5 degrees and then collects together the intervals where elevation angle is greater than or equal to 5 degrees.
STK provides two choices for access calculation sampling:
- Fixed Step
- STK uses a constant time step to generate samples.
- The step size needs to be sufficiently small to avoid missing satisfaction intervals.
- Adaptive
- The algorithm chooses an appropriate step size for each time, appropriate to the frequency content of the constraint’s value over time.
- This method relieves you from the burden of choosing the proper step size.
- It makes the step size smaller or larger as appropriate, improving computation speed.
The adaptive algorithm aims to compute access quickly but accurately.
- It samples sparingly, only enough to properly identify the trends in the constraint’s value over time.
- It avoids using ephemeris steps to drive step size selection.
- It considers the frequency content of each object’s position and attitude.
- It considers the frequency content of the relative position direction and magnitude.
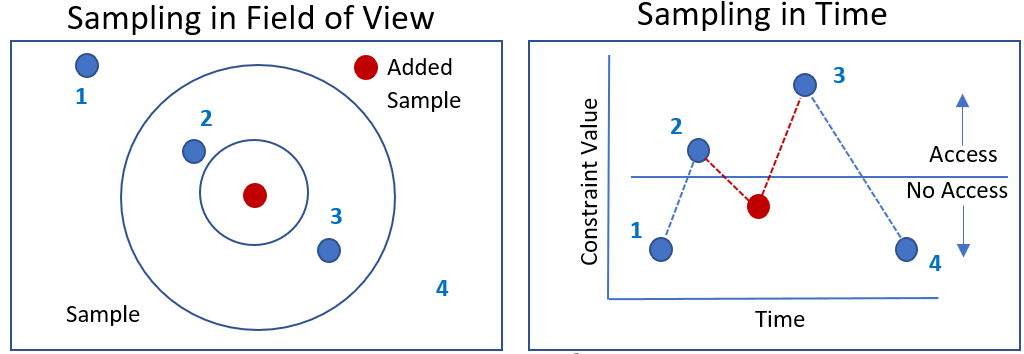
- Constraints themselves can add a sample to avoid missing events.
- It limits the step size based upon each object’s setting of its max step size for use in Access.
- It limits the step based on access’s max step size setting.
- It iteratively subsamples to determine satisfaction start times and stop times accurately.
- It interpolates the position and attitude of each object at a given time to compute a precise constraint value at that time.
- It does not interpolate the constraint value from a coarse sampling.
Fine granularity in sampling is not necessary to achieve accurate results.
Example: Sampling field of view for a conical sensor with a hole
If the samples move over the hole without a sample inside the hole, the constraint will force STK to add a sample there. This causes STK to indentify two access intervals, because there’s no access when inside the hole.
Iterative subsampling
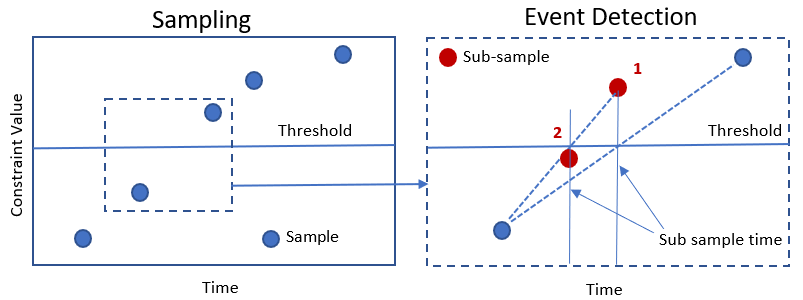
Event detection
Event detection is the process of finding the constraint satisfaction start and stop times, which are the times when constraint satisfaction transitions.
By default, STK finds precise event times through iterative subsampling until the length of the time interval that contains the event time is within a time convergence tolerance. By default, this tolerance is 5 msec, meaning that the event time uncertainty is within 5 msec, which is more than sufficient for most use cases. You can choose an appropriate value (higher or lower), with lower values requiring more computation time.
You can also compute satisfaction times based on sampling without performing subsampling. This is appropriate when you use fixed-step sampling with a small step size so that refinement of event time is not necessary.
1