- java.lang.Object
-
- agi.foundation.routedesign.RouteProfile
-
- agi.foundation.routedesign.TerrainAvoidanceProfile
-
public class TerrainAvoidanceProfile extends RouteProfile
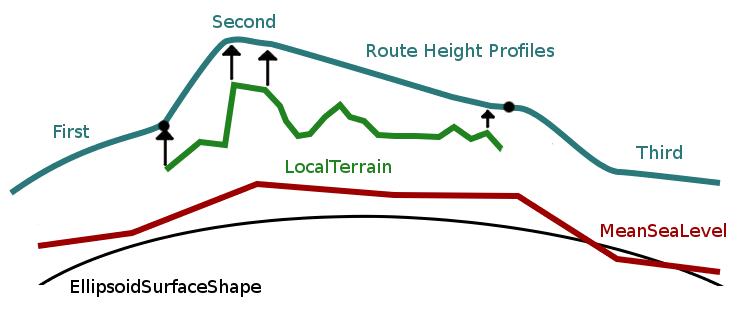
A profile that defines the height and speed necessary to transition from an initial height and speed to a final height and speed while attempting to maintain a minimum height above intervening terrain. This is useful when modeling low altitude aircraft trajectories in areas where the terrain varies significantly between waypoints.
The following figure shows the behavior of a particular route profile. Note how the profile will find the convex hull and maintain height in between the peaks.
-
-
Nested Class Summary
Nested Classes Modifier and Type Class and Description static classTerrainAvoidanceProfile.ConfigurationDataAn enumeration indicating the result of configuring theTerrainAvoidanceProfile.
-
Constructor Summary
Constructors Constructor and Description TerrainAvoidanceProfile()Create a new instance.TerrainAvoidanceProfile(TerrainProvider terrain, double minimumHeight, double samplingDistance, double initialHeight, double finalHeight, ProfileDynamics profileDynamics, double targetSpeed)Create a new instance based on the given terrain and boundary conditions.
-
Method Summary
All Methods Instance Methods Concrete Methods Modifier and Type Method and Description ConfigurableProfilecreateConfigurableProfile(SurfaceSegment surfacePath)Create a profile based on the given settings that theRoutePropagatorcan use to configure this profile in relation to all other profiles along the route.booleangetAllowModificationOfFinalHeight()Gets a value indicating whether the profile can update the final height in the course of configuring itself in relation to the surrounding profiles.booleangetAllowModificationOfInitialHeight()Gets a value indicating whether the profile can update the initial height in the course of configuring itself in relation to the surrounding profiles.ProfileDynamicsgetDynamics()Gets the set of parameters specifying the achievable accelerations during the profile.doublegetFinalHeightAboveTerrain()Gets the final height above the terrain, in meters.doublegetInitialHeightAboveTerrain()Gets the initial height above the terrain, in meters.doublegetMinimumHeightAboveTerrain()Gets the minimum height at which to traverse above the terrain, in meters.doublegetSamplingDistance()Gets the rate at which to sample the terrain, in meters.ProfileSpeedgetSpeed()Gets the speed at which to traverse over the terrain.TerrainProvidergetTerrain()Gets the terrain over which to traverse.voidsetAllowModificationOfFinalHeight(boolean value)Sets a value indicating whether the profile can update the final height in the course of configuring itself in relation to the surrounding profiles.voidsetAllowModificationOfInitialHeight(boolean value)Sets a value indicating whether the profile can update the initial height in the course of configuring itself in relation to the surrounding profiles.voidsetDynamics(ProfileDynamics value)Sets the set of parameters specifying the achievable accelerations during the profile.voidsetFinalHeightAboveTerrain(double value)Sets the final height above the terrain, in meters.voidsetInitialHeightAboveTerrain(double value)Sets the initial height above the terrain, in meters.voidsetMinimumHeightAboveTerrain(double value)Sets the minimum height at which to traverse above the terrain, in meters.voidsetSamplingDistance(double value)Sets the rate at which to sample the terrain, in meters.voidsetSpeed(ProfileSpeed value)Sets the speed at which to traverse over the terrain.voidsetTerrain(TerrainProvider value)Sets the terrain over which to traverse.
-
-
-
Constructor Detail
-
TerrainAvoidanceProfile
public TerrainAvoidanceProfile()
Create a new instance.
-
TerrainAvoidanceProfile
public TerrainAvoidanceProfile(TerrainProvider terrain, double minimumHeight, double samplingDistance, double initialHeight, double finalHeight, ProfileDynamics profileDynamics, double targetSpeed)
Create a new instance based on the given terrain and boundary conditions.- Parameters:
terrain- The terrain defining the height profile.minimumHeight- The minimum height above the terrain, in meters.samplingDistance- The rate at which to sample the terrain along the surface path, in meters. A smaller sampling distance will result in fewer violations of the minimum height. Whereas, a larger sampling distance will be faster. The sampling distance should reflect how quickly the terrain height is changing over the surface region in which the corresponding procedure occurs.initialHeight- The initial height above the terrain, in meters.finalHeight- The final height above the terrain, in meters.profileDynamics- The dynamical properties of the position.targetSpeed- The target speed at which to traverse over the terrain, in meters per second.
-
-
Method Detail
-
createConfigurableProfile
public ConfigurableProfile createConfigurableProfile(SurfaceSegment surfacePath)
Create a profile based on the given settings that theRoutePropagatorcan use to configure this profile in relation to all other profiles along the route.- Specified by:
createConfigurableProfilein classRouteProfile- Parameters:
surfacePath- The surface path over which the profile is defined.- Returns:
- The configurable profile used by the
RoutePropagatorto configure the route.
-
getDynamics
public final ProfileDynamics getDynamics()
Gets the set of parameters specifying the achievable accelerations during the profile.
-
setDynamics
public final void setDynamics(ProfileDynamics value)
Sets the set of parameters specifying the achievable accelerations during the profile.
-
getSpeed
public final ProfileSpeed getSpeed()
Gets the speed at which to traverse over the terrain.
-
setSpeed
public final void setSpeed(ProfileSpeed value)
Sets the speed at which to traverse over the terrain.
-
getAllowModificationOfInitialHeight
public final boolean getAllowModificationOfInitialHeight()
Gets a value indicating whether the profile can update the initial height in the course of configuring itself in relation to the surrounding profiles.
-
setAllowModificationOfInitialHeight
public final void setAllowModificationOfInitialHeight(boolean value)
Sets a value indicating whether the profile can update the initial height in the course of configuring itself in relation to the surrounding profiles.
-
getAllowModificationOfFinalHeight
public final boolean getAllowModificationOfFinalHeight()
Gets a value indicating whether the profile can update the final height in the course of configuring itself in relation to the surrounding profiles.
-
setAllowModificationOfFinalHeight
public final void setAllowModificationOfFinalHeight(boolean value)
Sets a value indicating whether the profile can update the final height in the course of configuring itself in relation to the surrounding profiles.
-
getSamplingDistance
public final double getSamplingDistance()
Gets the rate at which to sample the terrain, in meters. A smaller sampling distance will result in fewer violations of the minimum height. Whereas, a larger sampling distance will be faster. The sampling distance should reflect how quickly the terrain height is changing over the surface region in which the corresponding procedure occurs.
-
setSamplingDistance
public final void setSamplingDistance(double value)
Sets the rate at which to sample the terrain, in meters. A smaller sampling distance will result in fewer violations of the minimum height. Whereas, a larger sampling distance will be faster. The sampling distance should reflect how quickly the terrain height is changing over the surface region in which the corresponding procedure occurs.
-
getMinimumHeightAboveTerrain
public final double getMinimumHeightAboveTerrain()
Gets the minimum height at which to traverse above the terrain, in meters.
-
setMinimumHeightAboveTerrain
public final void setMinimumHeightAboveTerrain(double value)
Sets the minimum height at which to traverse above the terrain, in meters.
-
getInitialHeightAboveTerrain
public final double getInitialHeightAboveTerrain()
Gets the initial height above the terrain, in meters.
-
setInitialHeightAboveTerrain
public final void setInitialHeightAboveTerrain(double value)
Sets the initial height above the terrain, in meters.
-
getFinalHeightAboveTerrain
public final double getFinalHeightAboveTerrain()
Gets the final height above the terrain, in meters.
-
setFinalHeightAboveTerrain
public final void setFinalHeightAboveTerrain(double value)
Sets the final height above the terrain, in meters.
-
getTerrain
public final TerrainProvider getTerrain()
Gets the terrain over which to traverse.
-
setTerrain
public final void setTerrain(TerrainProvider value)
Sets the terrain over which to traverse.
-
-