Predefined Attitude Profile Definitions
This topic provides technical notes that define and describe all predefined vehicle attitude types that are installed with STK. See Predefined Types for a table that lists which vehicle objects can use each of the predefined attitude profile types.
To expand or collapse all sections in this topic, click  in the Help toolbar above.
in the Help toolbar above.
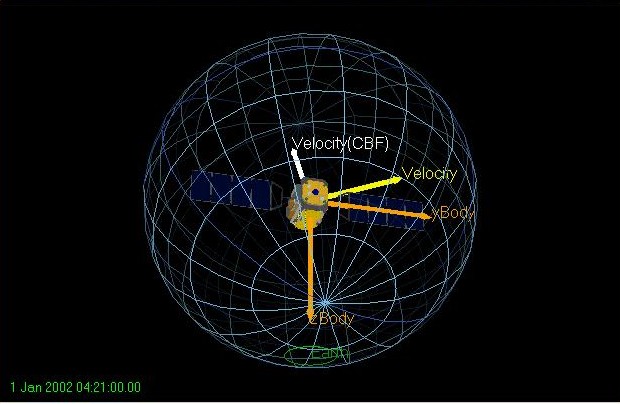
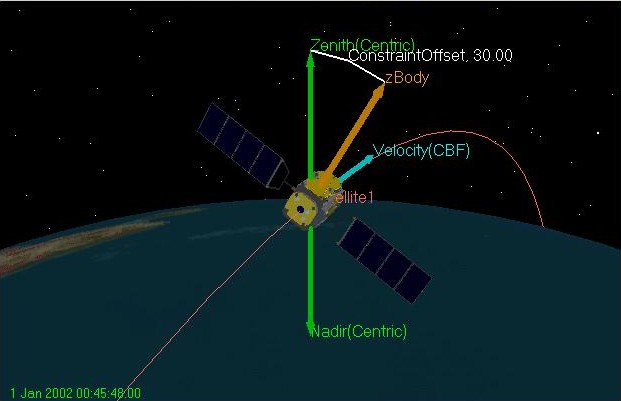
This profile aligns the vehicle's Z axis with the geocentric nadir direction and constrains its X axis in the direction of the ECF velocity vector.
You can use the Constraint Offset angle to introduce an additional rotational offset from the nadir vector. The angle is measured in a left-handed sense about the nadir vector. For example, to constrain with the Y axis, set the offset to +90 degrees.
The Nadir Alignment with ECF Velocity Constraint profile may not be appropriate for satellites in synchronous or highly eccentric orbits. In these cases, the ECF velocity vector may be poorly defined and/or alternating in direction. Instead, use the Nadir Alignment with ECI Velocity Constraint profile.
The illustration below is the profile in an attitude sphere as displayed in the 3D Attitude Graphics window. Components were created with the Vector Geometry tool. It shows the difference between an ECF and ECI velocity constraint in a nadir-aligned profile for a satellite with a highly elliptical (Molniya) orbit. The ECF velocity vector — labeled Velocity (CBF) in the illustration — diverges considerably from the ECI velocity vector as the satellite approaches apogee. A near-polar orbit can also be used to illustrate the difference in results between an ECF and ECI velocity constraint.
This profile aligns the vehicle's Z axis with the geocentric nadir direction and constrains its X axis in the direction of the ECI velocity vector.
You can use the Constraint Offset angle to introduce an additional rotational offset from the nadir vector. The angle is measured in a left-handed sense about the nadir vector. For example, to constrain with the Y axis, set the offset to +90 degrees.
The illustration below is the profile in an attitude sphere as displayed in the 3D Attitude Graphics window. Components were created with the Vector Geometry tool. It shows the difference between an ECF and ECI velocity constraint in a nadir-aligned profile for a satellite with a highly elliptical (Molniya) orbit. The ECF velocity vector — labeled Velocity (CBF) in the illustration — diverges considerably from the ECI velocity vector as the satellite approaches apogee. A near-polar orbit can also be used to illustrate the difference in results between an ECF and ECI velocity constraint.
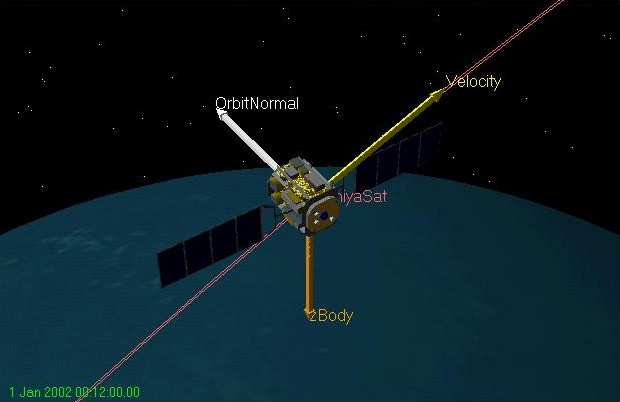
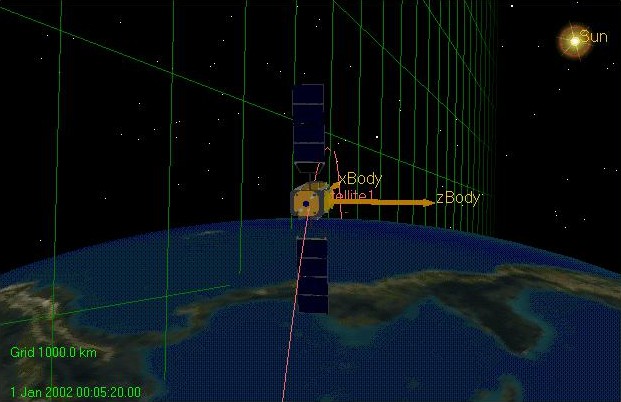
This profile aligns the vehicle's Z axis with the geocentric nadir direction and constrains its X axis in the direction of the orbit normal ( ) vector.
) vector.
You can use the Constraint Offset angle to introduce an additional rotational offset from the nadir vector. The angle is measured in a left-handed sense about the nadir vector. For example, to constrain with the Y axis, set the offset to +90 degrees.
The illustration below shows an example of this attitude type displayed in the 3D Graphics window, using components created with the Vector Geometry tool.
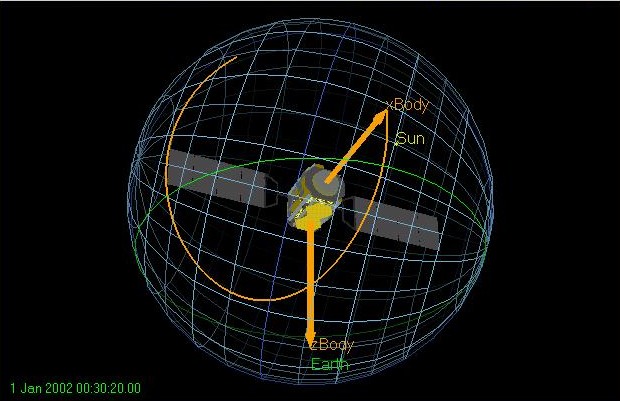
This profile aligns the vehicle's Z axis with the geocentric nadir direction and constrains its X axis in the direction of the Sun vector.
You can use the Constraint Offset angle to introduce an additional rotational offset from the nadir vector. The angle is measured in a left-handed sense about the nadir vector. For example, to constrain with the Y axis, set the offset to +90 degrees.
The illustration below shows an example of this attitude type displayed in the 3D Attitude Graphics window. It appears in an attitude sphere, with components created with the Vector Geometry tool. A trace shows the changes over time in the orientation of the Sun-constrained body X axis .
This profile aligns the vehicle's X axis with the Earth-fixed velocity vector direction and constrains the Z axis in the radial direction (the direction along the position vector and opposite to geocentric nadir).
You can use the Constraint Offset angle to introduce an additional rotational offset from the Earth-fixed velocity vector. This angle is measured in a right-handed sense. For example, to constrain with the Y axis, set the offset to +90 degrees.
This attitude profile is commonly used for aircraft and surface-based vehicles.
The illustration below shows an example of this attitude type as displayed in the 3D Graphics window. It uses components created with the Vector Geometry tool, and includes a 30-degree Constraint Offset angle, .
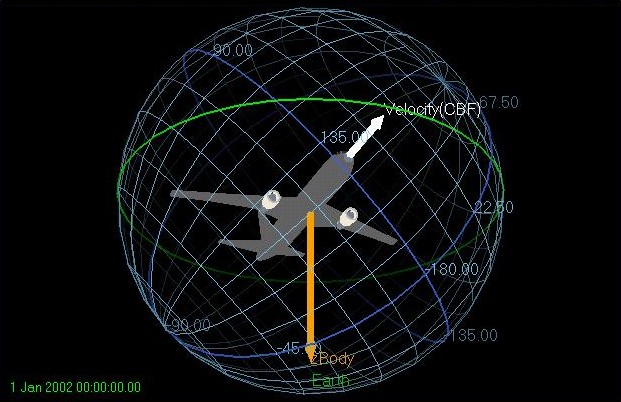
This profile aligns the vehicle's X axis with the Earth-fixed velocity vector direction and constrains the Z axis in the geocentric nadir direction.
You can use the Constraint Offset angle to introduce an additional rotational offset from the Earth-fixed velocity vector. This angle is measured in a left-handed sense about the Earth-fixed velocity vector. For example, to constrain with the Y axis, set the offset to +270 degrees.
This attitude profile is commonly used for aircraft and surface-based vehicles.
The illustration below shows an example of this attitude type displayed in the 3D Attitude Graphics window. It uses an attitude sphere and components created with the Vector Geometry tool.
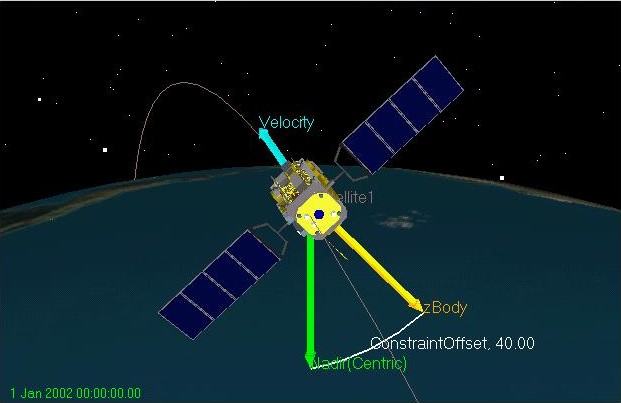
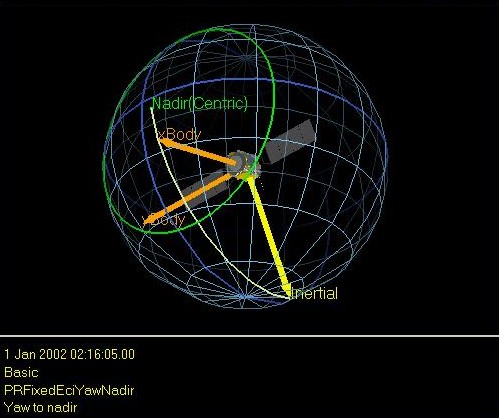
This profile aligns the vehicle's X axis with the direction of the Earth-centered inertial velocity and constrains the Z axis in the geocentric nadir direction.
You can use the Constraint Offset angle introduce an additional rotational offset from the inertial velocity vector. This angle is measured in a left-handed sense about the inertial velocity vector. For example, to constrain with the Y axis, set the offset to +270 degrees.
The illustration below shows an example of this attitude type as displayed in the 3D Graphics window. It uses components created with the Vector Geometry tool and includes a 40-degree Constraint Offset angle.
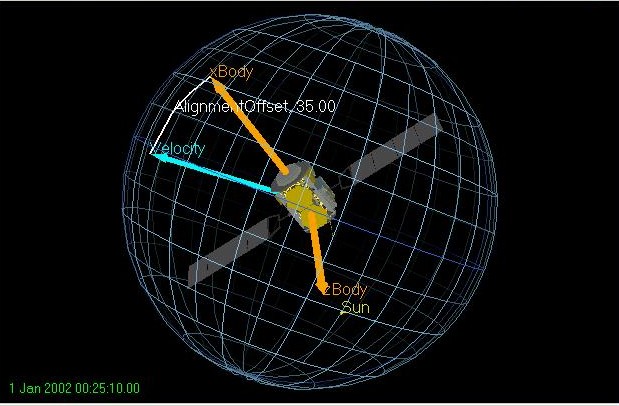
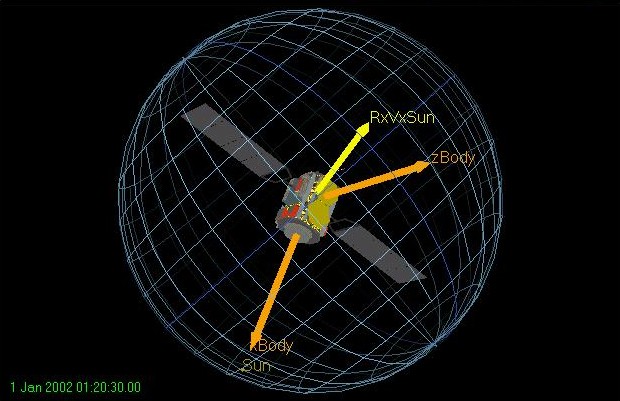
This profile aligns the satellite's X axis with the inertial velocity vector direction and constrains the Z axis in the direction of the Sun.
You can use the Alignment Offset angle to introduce an additional offset from the body Z axis. The angle is measured in a left-handed sense about the body Z axis. For example, to align the Y axis in the direction of the inertial velocity vector, set the offset to +90 degrees.
The illustration below shows an example of this attitude type as displayed in the 3D Attitude Graphics window. It uses an attitude sphere and components created with the Vector Geometry tool, and includes a 35-degree Alignment Offset angle.
This profile computes the roll (banking) of an aircraft based on a balancing of the forces acting on the aircraft. It assumes a zero angle of attack and no slip condition.
Attitude profiles for GNSS satellites (GPS, Galileo, QZSS)
- Block IIA.
This attitude profile accounts for the complex motion of Block IIA satellites. The Z body axis is aligned with the direction to the geodetic center of the Earth. The X body axis is nominally constrained toward the direction of the Sun, with a yaw bias offset of 0.5 deg. However, more complicated motion occurs during eclipsing and when the satellite passes nearly under the Sun direction, know as "the noon turn".
During the noon turn, the yaw motion is constrained by a maximum yaw rate of 0.13 deg/sec. When the nominal profile dictates that a higher yaw rate is required to maintain the X axis in the direction of the Sun, the satellite yaws at the maximum rate and maintains the maximum yaw rate until the nominal attitude is recovered.
At the beginning of an eclipse, the satellite transitions from its nominal yaw rate to the maximum yaw rate in a direction opposite the yaw bias. This transition happens at the maximum yaw acceleration of 0.00165 deg/sec2. The satellite continues to yaw at the maximum rate until eclipse exit, at which time two recovery paths back to the nominal attitude are computed. The first recovery path maintains the current yaw direction, while the second reverses the yaw direction at the maximum yaw acceleration. The path requiring the least time to recover the nominal yaw profile is selected.
For a full description of the GYM 95 profile, see:
Bar-Sever, Y.E. "A New Model for Yaw Attitude of Global Positioning System Satellites",
TDA Progress Report 42-123, November 15, 1995
- Block IIR Nominal. This profile has Z body axis aligned with the direction to the geocentric center of the Earth. It constrains the -X body axis nominally toward the direction of the Sun with zero yaw bias.
- Block IIA Nominal. This profile has the Z body axis aligned with the direction to the geocentric center of the Earth. It constrains the X body axis nominally toward the direction of the Sun with zero yaw bias.
- Block IIR:
This attitude profile follows the Block IIR nominal attitude profile with the exception of noon and midnight turns. During both the noon and midnight turn, the yaw motion is constrained by a maximum yaw rate of 0.2 deg/sec. The attitude follows the nominal profile until the maximum turn rate is reached. Slewing continues at the maximum turn rate until the yaw angle catches up with the nominal yaw angle, at which point the nominal profile resumes. For a full description of the Block IIR attitude profile, see:
Kouba, J., "A Simplified yaw-attitude model for eclipsing GPS satellites", GPS Solutions, 13:1-12, 2009.
- GalileoNominal – This is the Galileo nominal satellite attitude profile. It aligns the Z body axis direction with the direction to the center of the Earth. It nominally constrains the -X body axis direction toward the direction of the Sun with zero yaw bias. It is the same as the GPS Block IIR nominal attitude profile.
- GalileoIOV – This is the Galileo In-orbit Validation satellite attitude profile. It modifies the nominal Galileo profile during noon and midnight turns when the beta angle is low. You can see a description of the precise modification method here.
- GalileoFOC – This is the Galileo Full Operational Capability satellite attitude profile. It modifies the nominal Galileo profile during noon and midnight turns when the beta angle is low. You can see a description of the precise modification method here.
- Block IIF Nominal This profile has the Z body axis aligned with the direction to the geocentric center of the Earth. It constrains the X body axis nominally in the direction of the Sun with zero yaw bias.
- Block IIF
This attitude profile follows the Block IIF nominal attitude profile with the exception of noon turns and during special low beta-angle eclipse behavior. During the noon turn, the yaw motion is constrained by a maximum yaw rate of 0.11 deg/sec. During low beta-angle eclipse periods (|b| < 8 degrees), the yaw rate is chosen such that the yaw angle catches up with nominal yaw angle at the end of the eclipse period, at which point the nominal profile is resumed. Eclipse operations apply a yaw bias of magnitude 0.5 degrees and beta angle sign determination based on a U.S. Air Force memorandum (see reference below). The Block IIF attitude profile mainly follows one described by Dilssner. However, the computed yaw rates for each specific eclipse period are as described in Weiss et al.
Beta angle is defined as the angle of the direction to the Sun out of the orbit plane.
U.S. Air Force Memorandum in response to 14 AF/A30 Tasker 14AF_2011-01-20.
Dilssner, F., "GPS IIF-1 Satellite Antenna Phase Center and Attitude Modeling", Inside GNSS, September 2010.
Weiss, J.P., Bar-Sever, Y., Bertiger, W., Fesai, S.D., Harvey, N., Sibthorpe, A., "Modeling and Characterization of the GPS Block II/IIA/IIF Attitude", IGS Workshop, 2012.
- QZSS. These are vehicles in the Japanese QZSS system used for GPS augmentation. For beta angle above 20 degrees, the Z body axis is aligned with the direction to the geocentric center of the Earth. The profile constrains the -X body axis nominally toward the direction of the Sun with zero yaw bias (same as GPS Block IIR and Galileo). For beta angle under 20 degrees, the Z body axis is still aligned with the direction to the geocentric center of the Earth, but the -Y body axis is aligned with the positive orbit angular momentum direction.
This profile aligns the satellite's X axis with the Sun direction and constrains the Z axis in the direction of geocentric nadir.
Use the Alignment Offset angle to introduce an additional offset from the body Z axis. The angle is measured in a left-handed sense about the body Z axis. For example, to align the Y axis in the direction of the Sun, set the offset to +90 degrees.
The illustration below shows an example of this attitude type as displayed in the 3D Attitude Graphics window. It uses an attitude sphere and components created with the Vector Geometry Tool. A trace shows the changes over time in the orientation of the nadir-constrained body Z axis .
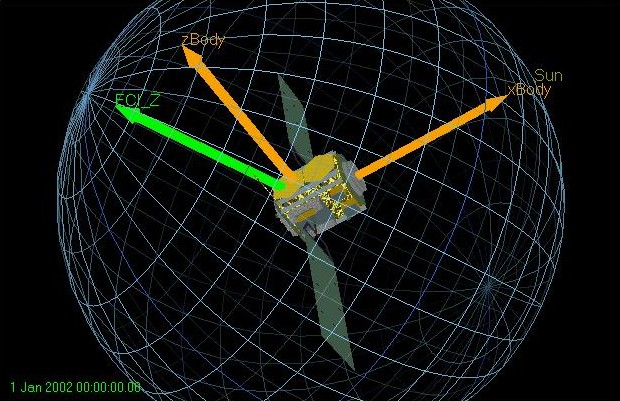
This profile has the satellite's X axis aligned with the Sun direction and constrains the Z axis in the direction of the normal to the ecliptic plane.
Use the Alignment Offset angle to introduce an additional offset about the body Z axis. The angle is measured in a left-handed sense about the body Z axis. For example, to align the Y axis in the direction of the Sun, set the offset to +90 degrees.
The illustration below shows an example of this attitude type as displayed in the 3D Graphics window. It uses components created with the Vector Geometry tool. In this case, the body Z axis is normal to the ecliptic plane, which is represented by a grid.
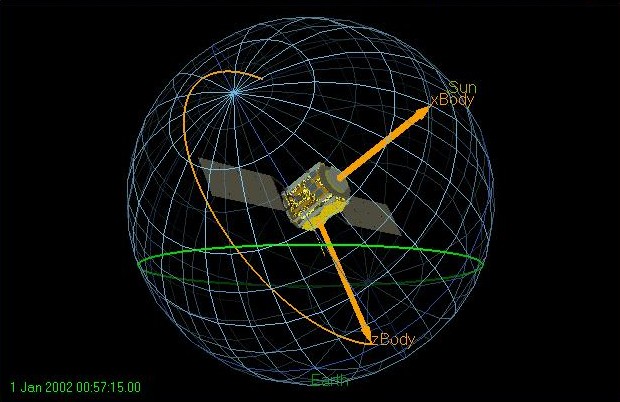
This profile aligns the satellite's X axis with the Sun direction and constrains the Z axis in the direction of the ECI Z axis.
Use an Alignment Offset angle to introduce an additional rotational offset about the body-fixed Z axis. The angle is measured in a left-handed sense about the body-fixed Z axis. For example, to align with the Y axis, set the offset to +90 degrees.
The illustration below shows an example of this attitude type as displayed in the 3D Attitude Graphics window. It uses an attitude sphere and components created with the Vector Geometry Tool.
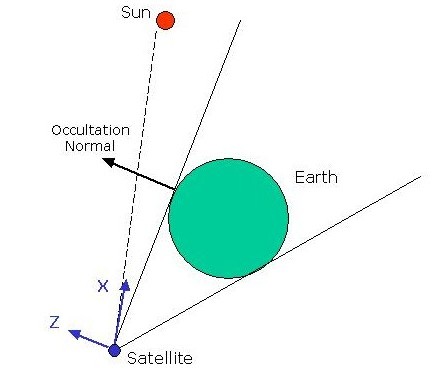
This profile aligns the body-fixed X axis with the Sun direction. It constrains the body-fixed Z axis as follows. Let P be a plane defined by the centers of mass of the satellite, the Sun, and the Earth. Let T be a line tangent to the Earth, drawn from the satellite's center of mass and lying on plane P, such that T lies closer to the satellite-Sun direction than any other line so defined. Then, the body-fixed Z axis is constrained toward the surface normal at the point where T is tangent to the Earth.
This profile aligns the body-fixed X axis with the Sun and places the body-fixed Z axis along the intersection of the orbit plane and the plane perpendicular to the Sun vector, calculated as () x Sun.
Use an Alignment Offset angle to introduce an additional rotational offset about the body-fixed Z axis. The angle is measured in a left-handed sense about the body-fixed Z axis. For example, to align the body-fixed Y axis in the Sun direction, set the offset to +90 degrees.
The illustration below shows an example of this attitude type as displayed in the 3D Attitude Graphics window. It uses an attitude sphere and components created with the Vector Geometry Tool.
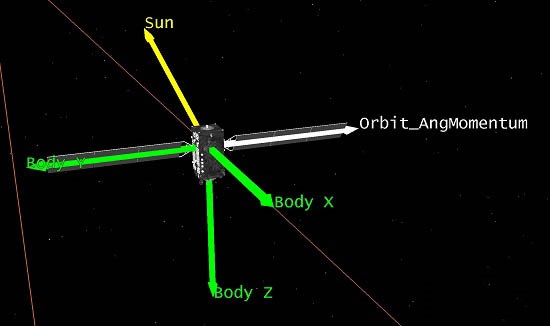
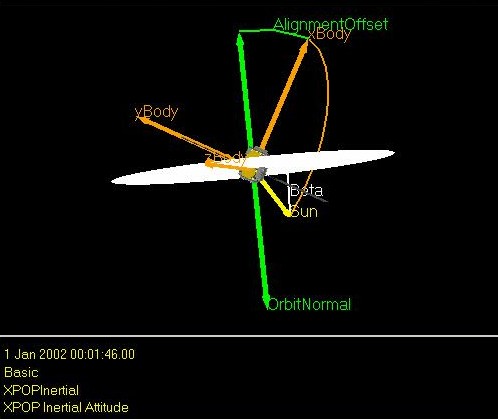
This profile places the satellite's +X body axis along the orbit normal () for  <0. For >0, it places the -X body axis along the orbit normal. As the illustration below shows, is the angle of the vector to the Sun out of the orbit plane and is measured as positive in the direction of the orbit normal. This configuration places the Sun on the -X side of the spacecraft. The placement of the Y body axis is perpendicular to the plane of the X body axis and Sun direction (
<0. For >0, it places the -X body axis along the orbit normal. As the illustration below shows, is the angle of the vector to the Sun out of the orbit plane and is measured as positive in the direction of the orbit normal. This configuration places the Sun on the -X side of the spacecraft. The placement of the Y body axis is perpendicular to the plane of the X body axis and Sun direction ( ).
).
The International Space Station uses this attitude profile .
Use an Alignment Offset angle to introduce an additional rotational offset about the body-fixed Z axis. The angle is measured in a left-handed sense about the body-fixed Z axis. For example, to align with the Y axis, set the offset to +90 degrees.
The illustration below shows an example of this attitude type displayed in the 3D Attitude Graphics window. It uses components created with the Vector Geometry tool.
This profile fixes the Z body axis in inertial space using the selected coordinate type. It constrains the X axis, via motion in the yaw sense about the body-fixed Z axis, toward the geocentric nadir direction.
This profile is useful for satellites in highly elliptical orbits.
The illustration below shows an example of this attitude type as displayed in the 3D Attitude Graphics window. It uses an attitude sphere and components created with the Vector Geometry tool.
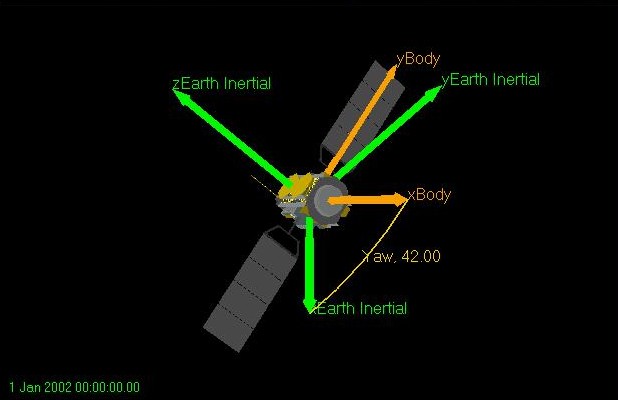
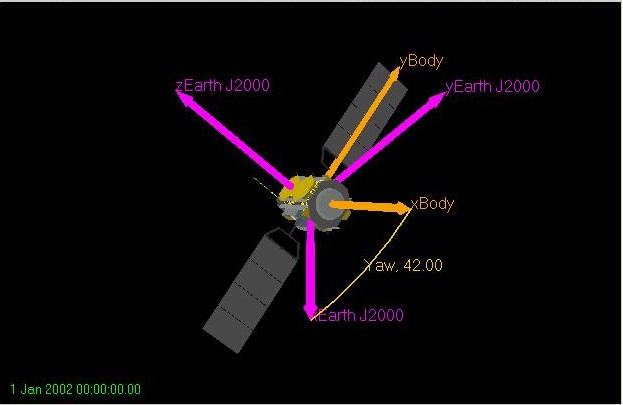
The illustration below shows an example of this attitude type as displayed in the 3D Attitude Graphics window. It uses components created with the Vector Geometry tool. The attitude profile is defined by applying a yaw of 42 degrees to the body-fixed axes with respect to the inertial axes.
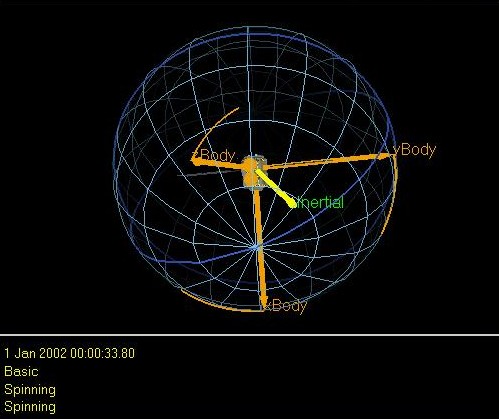
Positive Spin Rate values indicate rotation in a right-handed sense with respect to the spin axis. You specify the initial orientation of the vehicle by using the Spin Offset and offset Epoch fields. The Spin Offset is an angle about the spin axis that locates the initial X axis from the X axis of the orientation produced by performing a yaw-pitch-roll sequence from a set of reference axes. The reference axes for doing the yaw-pitch-roll sequence (to locate the spin axis orientation) is the vehicle's central body inertial axes.
The illustration below shows an example of this attitude type as displayed in the 3D Attitude Graphics window. It uses an attitude sphere and components created with the Vector Geometry Tool.
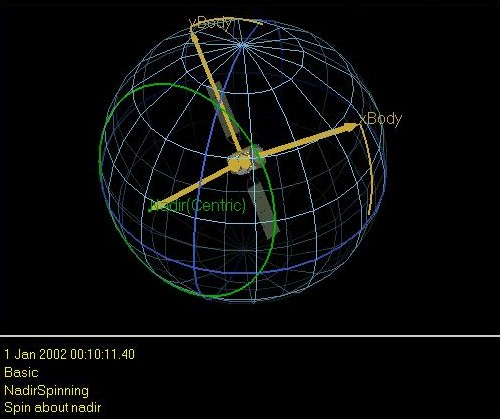
This profile assumes that the satellite's Z axis is the spin axis and is aligned to geocentric nadir. The other spin-related fields are defined in the same manner as for the spinning attitude. The Spin Offset is an angle about the centric nadir direction that locates the initial Y axis from the negative of the orbit normal direction, computed using the vehicle's central body inertial axes.
The illustration below shows an example of this attitude type displayed in the 3D Attitude Graphics window, using an attitude sphere.
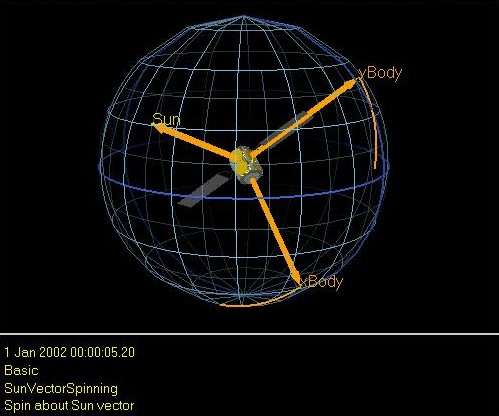
The body-fixed Z axis points to the Sun and the satellite rotates about the Sun vector. The other spin-related fields are defined in the same manner as for the spinning attitude. The Spin Offset is an angle about the apparent sun direction that locates the initial X axis from the direction of the ecliptic plane's normal vector.
The illustration below shows an example of this attitude type as displayed in the 3D Attitude Graphics window, using an attitude sphere.
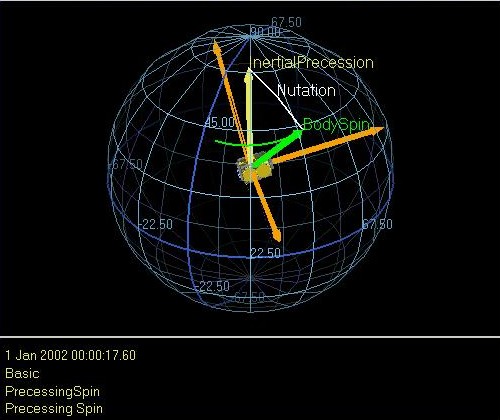
Spin occurs about a body-fixed direction specified by the Body Spin Axis of the vehicle's body-fixed axes. The spin axis itself precesses, executing a coning motion with constant cone angle specified by the Nutation Angle, about a direction fixed in the Reference Axes (specified by the Precession Axis direction of the Reference Axes). Both spin and precession occur at constant rates. For example, when the Body Spin Axis is the Z-axis and the Precession Axis is Z-axis of ICRF, and the nutation angle is 20 deg, then the Body Z-axis precesses about the ICRF Z-axis with a constant cone angle of 20 deg and the body spins about its Body Z-axis. Both spin and precession include specifications for their rotation Rates and initial Offsets at the specified Epoch. Rate and offset definitions are similar to those described for the spinning attitude profile type.
The orientation of the Body Axes is found from the Reference Axes by composing two rotations: precession then spin.
Precession occurs by rotating the BodyPrecessionRef axes (defined below) about the precession rotation axis
(both are fixed with respect to the Reference Axes); spin occurs by rotating about the Body Spin Axis.
The BodyPrecessionRef Axes are found as follows. The Reference Axes are rotated into Precession Axes using a
YPR sequence where the YPR angles represent the direction of the Precession Axis.
The Z-axis of the Precession Axes aligns with the Precession Axis.
Second, the Precession Axes are then rotated about its Y-axis by the Nutation angle (i.e., cone angle).
The resulting Cone Axes has its Z-axis lying on the cone.
Third, the Cone Axes are rotated into BodyPrecessionRef Axes using a RPY sequence where the YPR angles are the negatives
of the YPR angles representing the direction of the Body Spin Axis. The Body axes would coincide with the BodyPrecessionRef axes
at the Epoch specified for the Precessing Spin attitude if the precession offset and spin offset were both 0.0 deg.
The BodyPrecessionRef axes do not rotate with respect to the Reference Axes.
The precession rotation axis is the Precession Axis direction of the Reference Axes, expressed in BodyPrecessionRef Axes.
Define the precession angle as the precession offset plus
the precession rate times the time since Epoch; similarly, the spin angle is defined as the spin offset
plus the spin rate times the time since Epoch. The Body axes are found by first rotating the BodyPrecessionRef axes
by the precession angle about the precession rotation axis and then subsequently rotating by the spin angle
about the Body Spin axis.
This type of attitude can represent torque-free motion of the axisymmetric rigid body. To do that, the precession rate, spin rate, and nutation angle must be related to the ratio of the axial and transverse moment of inertia via the following formula:
(Axial Moment of Inertia) / (Transverse Moment of Inertia) = (Precession Rate) * cos(Nutation Angle) / (Spin Rate)
If this relationship is satisfied, then the angular momentum vector is aligned with the inertially fixed precession axis. You can enter the elements of the inertia matrix on the Mass property page.
The illustration below shows an example of this attitude type as displayed in the 3D Attitude Graphics window. It uses an attitude sphere and components created with the Vector Geometry Tool.
The illustration below shows an example of this attitude type as displayed in the 3D Attitude Graphics window. It uses components created with the Vector Geometry tool. The attitude profile is defined by applying a yaw of 42 degrees to the body-fixed axes with respect to the Earth J2000 reference axes.
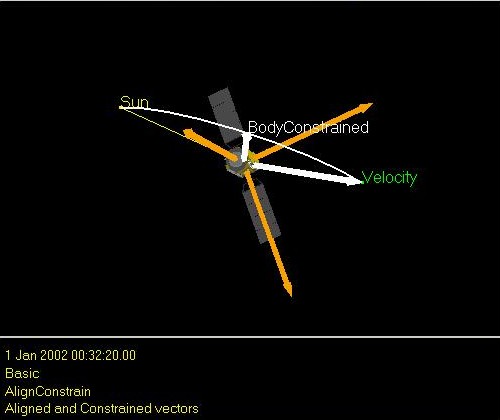
The body-fixed axes are oriented using aligned and constrained pairs of vectors.
In the first pair, a body-fixed vector is aligned with a specified reference vector. You choose a coordinate type (Cartesian, spherical, etc.) for the body-fixed vector. You choose the reference vector from a predefined list.
In the second pair, a different body-fixed vector is constrained in the direction of another reference vector. You choose a coordinate type (Cartesian, spherical, etc.) for the body-fixed vector. You choose the reference vector from a predefined list.
The Spin Aligned attitude type is deprecated in STK versions 10 and above because it may become ill-posed when configured with non-inertial spin vectors. AGI instead recommends that you use the Precessing Spin attitude type, which provides equivalent functionality.
This type of attitude profile is similar to the Precessing Spin type, which describes attitude motion as a composition of two rotations: spin and precession. Unlike the Precessing Spin type, which limits its precession axis to be inertially fixed, the Spin Aligned attitude profile permits its precession axis to be aligned with any vector available in the Vector Geometry tool.
The spin axis and the precession axis are related via a configurable Nutation Angle. Both spin and precession include specifications for their rotation Rates and initial Offsets at the specified Epoch. Rate and offset definitions are similar to those described for the spinning attitude profile type.
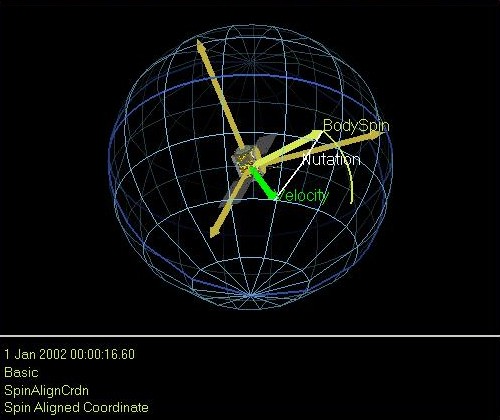
The illustration below shows an example of this attitude type displayed in the 3D Attitude Graphics window. It uses an attitude sphere as well as components created with the Vector Geometry tool.
At the boundaries, you can design the motion to match:
- Attitude. STK performs an eigen-axis rotation. This carries the transition at a constant rate, determined by the ratio of the total angular displacement to the selected duration. To perform this motion, select FixedTimeSlew as the Attitude Name and disable the Smooth option.
- Both attitude and angular rate. STK performs a more complicated variable rate motion, which depends on the angular velocities at the boundaries in addition to the angular displacement and the selected duration. To perform this motion, select FixedTimeSlew as the Attitude Name and enable the Smooth option.
In both cases, the motion is completed by the selected time.
| Mode | Description |
|---|---|
| Fixed Rate | The time required to change attitude will be calculated by applying a fixed slew rate, limited to the Maximum slew time. From the Slew segment timing menu, select an event within the window of opportunity to trigger each slew, or select Optimal to change attitude whenever the slew can be performed most efficiently. Define the maximum slew rate by entering a maximum overall Magnitude. You can constrain the slew rate in specific directions by selecting one or more Per Axis rates and defining separate maximum rates for those axes. |
| Constrained | STK calculates the time required to change attitude by applying a constrained slew rate and acceleration, limited to the Maximum slew time. From the Slew segment timing menu, select an event within the window of opportunity to trigger each slew, or select Optimal to change attitude whenever the slew can be performed most efficiently. From the Slew type menu, select to use a second- or third-order spline as the interpolation method of the slew's data points. Define the maximum slew rate and slew acceleration by entering for each the maximum overall Magnitude. You can constrain the slew rate or acceleration in specific directions by selecting one or more Per Axis rates and defining separate maximum rates and accelerations for those axes. |