The Ansys Systems Tool Kit® (STK®) EOIR capability supports up to 24 sensors and up to 36 bands per sensor. Bands share a common location and line of sight, but otherwise can have different parameters. Two typical uses for bands are to simulate:
- Different wavelength response capabilities, as for multiband sensor
- Different image magnifications, as for different settings of a zoom lens
To define an EOIR sensor, go to the Definition page of the Sensor properties and select EOIR as the Sensor Type.
For an example of how to use EOIR and STK processing to measure the visual magnitude of stars, see Shining a Light on Visual Magnitude (PDF).
Adding bands
At the top of the properties Definition page is a list of the bands for the EOIR sensor. Click to add a new band for an EOIR sensor and enter its name in the Band Name text box. To delete a band, select it in the list and click . You can also select whether or not to render each band by selecting the Render Band check box next to the band name.
Defining bands
You can define the following types of properties for each band in an EOIR sensor:
To view or modify the properties for a particular band, select it in the list of bands and select one of these four properties tabs. The spatial, spectral, optical, and radiometric properties panels display the values of the highlighted band. For descriptions of the parameters under each of these tabs, click the links above.
Sensor-level properties
You can also define certain properties that apply to the EOIR sensor in general, including all bands. These properties all appear below the band-specific tabs on the Definition panel. For details on specifying sensor jitter, see Jitter. The following table describes the other properties.
| Property | Description |
|---|---|
| Processing Level |
From the following list, select the type of calculation performed by this EOIR Sensor-Scene Generator pair:
Each of these successive modes is more computationally intensive and will require more time to generate an image. For descriptions of the raw output data for these settings, see the table below this one. |
| Scan Mode | EOIR uses 2D Framing Array as the type of scan mode for processing-level calculation. You cannot modify this. |
| Show Motion Blur |
During the integration time, both the sensor and the objects in the scene are potentially moving. By selecting this check box, EOIR will simulate motion blur as follows:
|
| Smear Rate | Enter values in mrad/sec for the along-scan and across-scan smear rate of the EOIR sensor relative to the sensor up vector. |
The following table describes the raw data output for the three Processing Level options that lead to output production from EOIR:
| Processing Level Setting | Description of raw data |
|---|---|
| Geometric Input | Produces temperature values, in Kelvin, for all virtual pixel intersections with area or point targets. |
| Radiometric Input | Produces the projected energy, in W/cm2, onto the focal plane for all virtual pixels before all sensor effects are applied. |
| Sensor Output, Quantization Off | Produces analog output energy in units of electrons. |
| Sensor Output, Quantization On | Produces the digital output signal in units of digital counts. |
Jitter
You can model sensor jitter by either applying Gaussian line-of-sight motion or by using a jitter file.
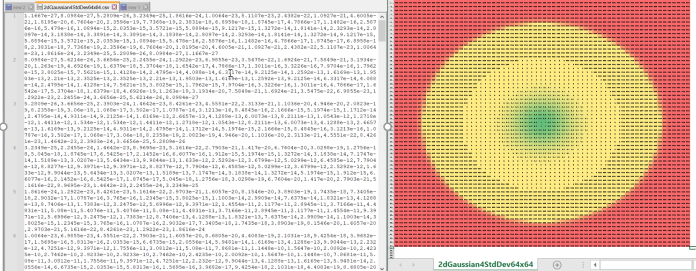
A jitter file is a two-dimentional matrix of CSVs that gives certain values related to the light coming down the center beam that would land on the image plane. In the illustration, the values on the left correspond to the first six rows of dots across the top of the diagram on the right. This particular diagram represents a typical probability distribution, where the probabilities are very low at the edges (red) and rise sharply when approaching the center (green).
In the Jitter subpanel, you can select the following jitter modeling parameters:
| Parameter | Description |
|---|---|
| (method) |
Using the shortcut menu, select one of the following modeling methods for assigning jitter values:
|
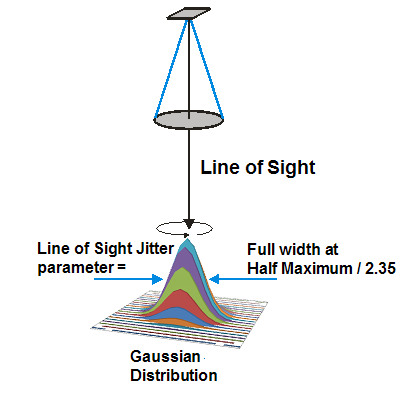
| Line of Sight Jitter | Vibrations of a sensor's parent object can cause the Line of Sight to move during integration time, blurring the image. Enter an angle that describes the dimension of an assumed Gaussian motion of the Line of Sight, and EOIR will interpret it as (Full Width at Half Maximum)/2.35. This parameter is only valid for LOS Gaussian type. |
| Data File | Click the ellipsis to browse to and select a jitter file. The file can be your own or one included in the STK_ODTK install, typically in <Install Dir>/EOIR_Databases/PropertyFiles/Shape_Files. This parameter is not available for LOS Gaussian method. |
| Data File Sampling |
Enter a value for one of the following two sampling settings:
|
The following is a diagram of the LOS Gaussian method modeling.
Over Sample Factor Settings
You can create a Windows user environment variable to adjust the balance between rendering speed and EOIR image fidelity. The user environment variable AGI_EOIR_SENSOR_OSF can have the values 1, 2, 4, 8, 16, and 32. Each of these specifies how EOIR sensors will oversample spatial data, resulting in differences in both performance and fidelity. A lower value generates a smaller image at a faster speed, while a higher value generates a larger image at a slower speed. If you do not set the OSF value with an environment variable, then the default value is 4.
If you want to simply and quickly increase the rendering speed in your scenario, you can override the oversampling value by selecting the Minimize OSF check box in the Over Sample Factor Settings panel on the Sensor Definition page. Doing this sets the OSF value to 1.