- java.lang.Object
-
- agi.foundation.geometry.shapes.Figure
-
- agi.foundation.geometry.shapes.Solid
-
- agi.foundation.geometry.shapes.SensorFieldOfView
-
- agi.foundation.geometry.shapes.SyntheticApertureRadarVolume
-
- All Implemented Interfaces:
- IServiceProvider
public class SyntheticApertureRadarVolume extends SensorFieldOfView
A sensor volume defined by inner and outer half angles, fore and aft exclusion angles, and a radial range limit. The outer half angle defines the outer boundary of the volume, and the other half angles define exclusion boundaries for the sensor volume.As depicted in the figure below, the vertex of the volume is located at the origin and the sensor principal direction is along the positive z-axis. Half angles measured from the principal direction are used to define the outer boundary of the volume as well as an interior conical volume of exclusion. Fore and aft half angles are used to define a conical volumes of exclusion about the positive and negative x-axis, respectively. The range limit measured radially from the origin closes the volume.
-
-
Constructor Summary
Constructors Constructor and Description SyntheticApertureRadarVolume()Constructs a sensor volume with a default definition, in which theInnerHalfAngle(get) has a value of one-fourth pi radians, theOuterHalfAngle(get) has a value ofConstants.HalfPiradians, theForeHalfAngle(get/set) andAftHalfAngle(get/set) are both equal to zero, and the radius is equal to positive infinity.SyntheticApertureRadarVolume(double innerHalfAngle, double outerHalfAngle, double aftHalfAngle, double foreHalfAngle)Constructs a volume of infinite radius with the provided parameters.SyntheticApertureRadarVolume(double innerHalfAngle, double outerHalfAngle, double aftHalfAngle, double foreHalfAngle, double radius)Constructs a volume of limited radius with the provided parameters.
-
Method Summary
All Methods Instance Methods Concrete Methods Modifier and Type Method and Description booleanencloses(Cartesian point)Indicates if the provided point is inside the volume.doublegetAftHalfAngle()Gets the aft half angle defining the conical volume of exclusion about the negative x-axis.EnclosureDescriptionCollectiongetEnclosureDescriptions()Gets the list of descriptions for the enclosure functions for this solid.doublegetForeHalfAngle()Gets the fore half angle defining the conical volume of exclusion about the positive x-axis.doublegetInnerHalfAngle()Gets the inner half angle used to define the interior conical volume of exclusion.booleangetIsConnected()Gets a value indicating whether the figure is connected.doublegetOuterHalfAngle()Gets the outer half angle used to define the exterior conical boundary of the volume.SensorProjectiongetProjection(Ellipsoid ellipsoid, KinematicTransformation ellipsoidToSensorTransformation, SensorProjectionOptions projectionOptions)Gets the projection of the sensor onto the front surface of a specified ellipsoid and onto a plane at a specified distance in space.protected voidonRadiusChanged()voidsetAftHalfAngle(double value)Sets the aft half angle defining the conical volume of exclusion about the negative x-axis.voidsetForeHalfAngle(double value)Sets the fore half angle defining the conical volume of exclusion about the positive x-axis.voidsetInnerOuterHalfAngles(double inner, double outer)Sets the inner and outer half angles of a sensor, which define part of the sensor volume.-
Methods inherited from class agi.foundation.geometry.shapes.SensorFieldOfView
getProjection, getRadius, getService, setRadius
-
-
-
-
Constructor Detail
-
SyntheticApertureRadarVolume
public SyntheticApertureRadarVolume()
Constructs a sensor volume with a default definition, in which theInnerHalfAngle(get) has a value of one-fourth pi radians, theOuterHalfAngle(get) has a value ofConstants.HalfPiradians, theForeHalfAngle(get/set) andAftHalfAngle(get/set) are both equal to zero, and the radius is equal to positive infinity.
-
SyntheticApertureRadarVolume
public SyntheticApertureRadarVolume(double innerHalfAngle, double outerHalfAngle, double aftHalfAngle, double foreHalfAngle)Constructs a volume of infinite radius with the provided parameters.- Parameters:
innerHalfAngle- The angle between the principal direction and the outermost boundary of the interior conical volume of exclusion. Defines the interior conical volume of exclusion.outerHalfAngle- The angle between the principal direction and the outermost boundary of the sensor volume. Defines the exterior conical boundary of volume.aftHalfAngle- Defines the conical volume of exclusion about the negative x-axis.foreHalfAngle- Defines the conical volume of exclusion about the positive x-axis.
-
SyntheticApertureRadarVolume
public SyntheticApertureRadarVolume(double innerHalfAngle, double outerHalfAngle, double aftHalfAngle, double foreHalfAngle, double radius)Constructs a volume of limited radius with the provided parameters.- Parameters:
innerHalfAngle- The angle between the principal direction and the outermost boundary of the interior conical volume of exclusion. Defines the interior conical volume of exclusion.outerHalfAngle- The angle between the principal direction and the outermost boundary of the sensor volume. Defines the exterior conical boundary of volume.aftHalfAngle- Defines the conical volume of exclusion about the negative x-axis.foreHalfAngle- Defines the conical volume of exclusion about the positive x-axis.radius- The radial limit of the volume. This is the maximum range at which the sensor can detect a target.
-
-
Method Detail
-
getIsConnected
public boolean getIsConnected()
Gets a value indicating whether the figure is connected.- Specified by:
getIsConnectedin classFigure
-
onRadiusChanged
protected void onRadiusChanged()
- Overrides:
onRadiusChangedin classSensorFieldOfView
-
getInnerHalfAngle
public final double getInnerHalfAngle()
Gets the inner half angle used to define the interior conical volume of exclusion.
-
getOuterHalfAngle
public final double getOuterHalfAngle()
Gets the outer half angle used to define the exterior conical boundary of the volume.
-
getForeHalfAngle
public final double getForeHalfAngle()
Gets the fore half angle defining the conical volume of exclusion about the positive x-axis.- Throws:
ArgumentOutOfRangeException- Thrown when the provided fore half angle is less than zero or greater than or equal toConstants.HalfPiradians.
-
setForeHalfAngle
public final void setForeHalfAngle(double value)
Sets the fore half angle defining the conical volume of exclusion about the positive x-axis.- Throws:
ArgumentOutOfRangeException- Thrown when the provided fore half angle is less than zero or greater than or equal toConstants.HalfPiradians.
-
getAftHalfAngle
public final double getAftHalfAngle()
Gets the aft half angle defining the conical volume of exclusion about the negative x-axis.- Throws:
ArgumentOutOfRangeException- Thrown when the provided aft half angle is less than zero or greater than or equal toConstants.HalfPiradians.
-
setAftHalfAngle
public final void setAftHalfAngle(double value)
Sets the aft half angle defining the conical volume of exclusion about the negative x-axis.- Throws:
ArgumentOutOfRangeException- Thrown when the provided aft half angle is less than zero or greater than or equal toConstants.HalfPiradians.
-
setInnerOuterHalfAngles
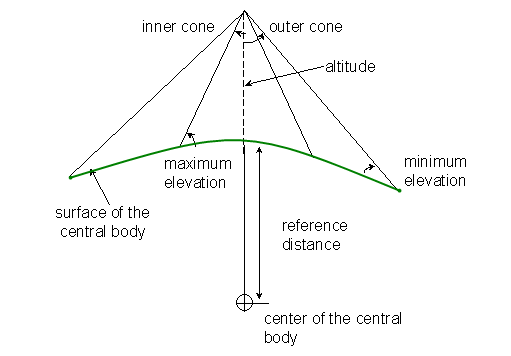
public final void setInnerOuterHalfAngles(double inner, double outer)Sets the inner and outer half angles of a sensor, which define part of the sensor volume.STK Desktop, unlike DME Component Libraries, determines the inner and outer half angles by specifying the maximum and minimum ground elevation angles, respectively. Additionally, a reference radius for the surface of the central body and the altitude of the SAR sensor above the surface must be specified as indicated in the following diagram.
- Parameters:
inner- The angle between the principal direction and the outermost boundary of the interior conical volume of exclusion. Defines the interior conical volume of exclusion.outer- The angle between the principal direction and the outermost boundary of the sensor volume. Defines the exterior conical boundary of volume.- Throws:
ArgumentOutOfRangeException- Thrown when either theinnerorouterhalf angle is outside the range 0 to π radians.ArgumentException- Thrown when theinnerhalf angle is greater than or equal to theouterhalf angle.
-
encloses
public boolean encloses(@Nonnull Cartesian point)
Indicates if the provided point is inside the volume.The
pointparameter must be expressed in the same coordinate frame that the volume is defined in.
-
getEnclosureDescriptions
public EnclosureDescriptionCollection getEnclosureDescriptions()
Gets the list of descriptions for the enclosure functions for this solid.- Specified by:
getEnclosureDescriptionsin classSolid- Returns:
- The list of enclosure descriptions.
-
getProjection
public SensorProjection getProjection(Ellipsoid ellipsoid, @Nonnull KinematicTransformation ellipsoidToSensorTransformation, SensorProjectionOptions projectionOptions)
Gets the projection of the sensor onto the front surface of a specified ellipsoid and onto a plane at a specified distance in space.- Specified by:
getProjectionin classSensorFieldOfView- Parameters:
ellipsoid- The ellipsoid on which the sensor is to be projected.ellipsoidToSensorTransformation- The transformation from the reference frame of the ellipsoid to the reference frame of the sensor.projectionOptions- The options controlling how the sensor is projected, ornullto use defaults.- Returns:
- The sensor projection.
-
-