Formation Flyer is to satisfy a case of maintaining formation and doing so with much less computational cost over the full rendezvous routine. It can handle straight flight and basic turns. It is not designed to come into formation from an arbitrary point, only to maintain. It can handle basic turns, but the results may vary depending on the aggressiveness of the turns. The cost should be significantly less than the full rendezvous.
A Rendezvous Formation flyer is a full 3D formation flying routine. It utilizes proportional navigation strategies (with modification) to lock onto a leader and come into formation with it as directed by the user.
Formation Flyer follows a rendezvous formation and begins at a point when the rendezvous is close to the formation point. The Formation Flyer is able to join up to the exact formation point and handles basic turns by closing in on the leader as best it can. See the picture below for an example route:
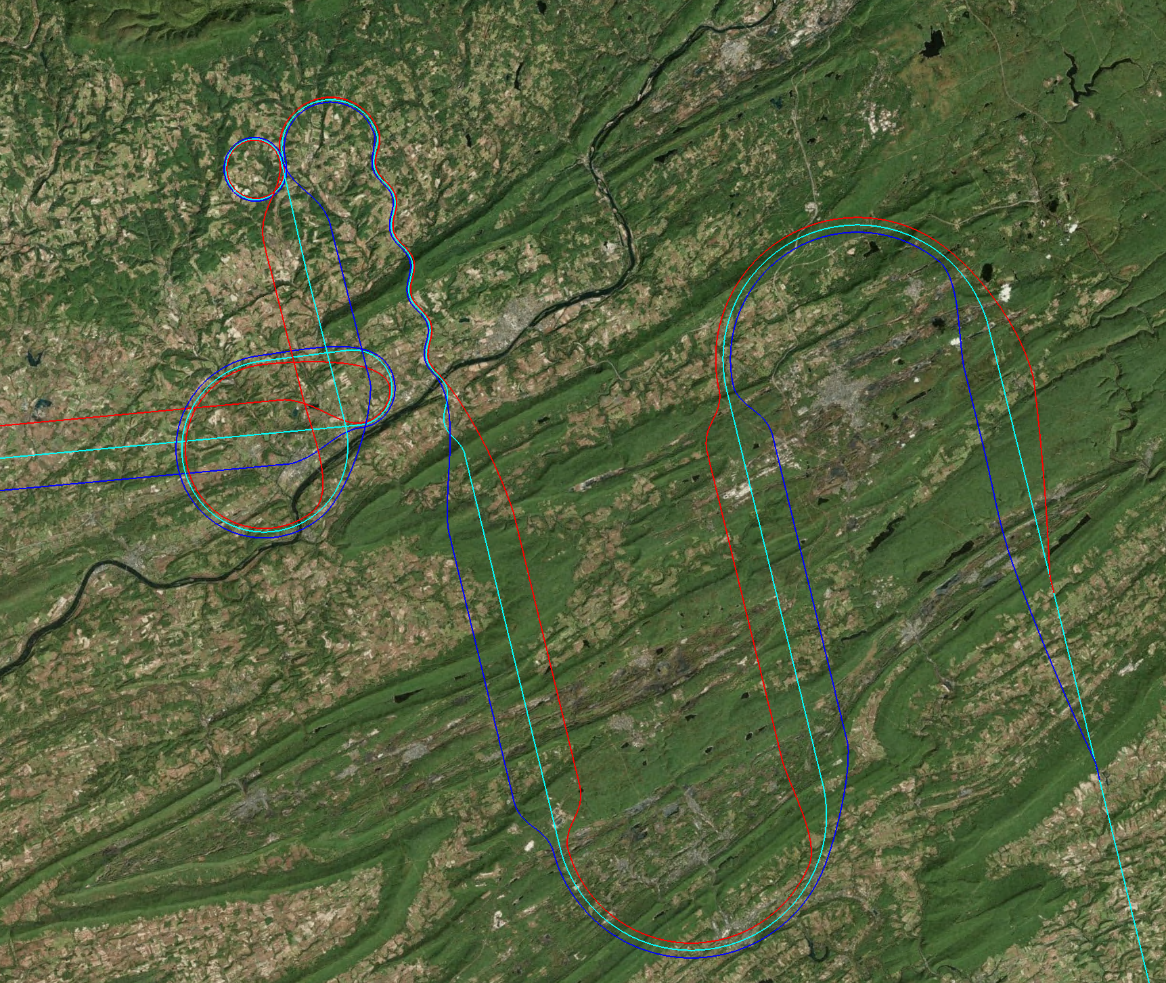
The leader is represented by the cyan line. The outside turn is represented by the red line. The inside turn is represented by the blue line.
The trajectory begins with the leader. It is followed by a Rendezvous formation basic maneuver, which should be used to set the follow parameters and to close in on the formation position. The rendezvous formation takes over after this point.
Position
| Field | Description |
|---|---|
| Relative Bearing |
The bearing relative to the target that the aircraft will achieve and maintain. |
| Relative Range |
The range from the target that the aircraft will achieve and maintain. |
| Altitude Split |
The altitude difference between the aircraft and the target. |