- java.lang.Object
-
- agi.foundation.geometry.shapes.Figure
-
- agi.foundation.geometry.shapes.Solid
-
- agi.foundation.geometry.shapes.SensorFieldOfView
-
- agi.foundation.geometry.shapes.RectangularPyramid
-
- All Implemented Interfaces:
- IServiceProvider
public class RectangularPyramid extends SensorFieldOfView
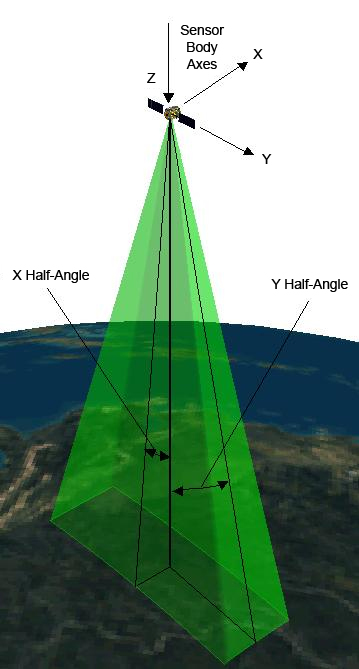
A sensor volume with a rectangular cross section and a radial range limit. The half angles define the outer boundaries of the volume, and the radial range closes the volume, forming a sensor volume in the shape of a rectangular pyramid.The vertex of the volume is located at the origin and the sensor principal direction is along the positive z-axis. Half angles measured from the principal direction and in the direction of the x-axis and y-axis define the extent of the rectangular cross section. The range limit measured radially from the origin closes the volume.
-
-
Constructor Summary
Constructors Constructor and Description RectangularPyramid()Constructs a volume with a default definition, in which theXHalfAngle(get/set) and theYHalfAngle(get/set) are equal toConstants.HalfPiradians.RectangularPyramid(double xHalfAngle, double yHalfAngle)Constructs a volume of infinite radius with the provided parameters.RectangularPyramid(double xHalfAngle, double yHalfAngle, double radius)Constructs a volume of limited radius with the provided parameters.
-
Method Summary
All Methods Instance Methods Concrete Methods Modifier and Type Method and Description booleanencloses(Cartesian point)Indicates if the provided point is inside the volume.EnclosureDescriptionCollectiongetEnclosureDescriptions()Gets the list of descriptions for the enclosure functions for this solid.booleangetIsConnected()Gets a value indicating whether the figure is connected.SensorProjectiongetProjection(Ellipsoid ellipsoid, KinematicTransformation ellipsoidToSensorTransformation, SensorProjectionOptions projectionOptions)Gets the projection of the sensor onto the front surface of a specified ellipsoid and onto a plane at a specified distance in space.doublegetXHalfAngle()Gets the half angle measured from the principal direction and in the direction of the x-axis.doublegetYHalfAngle()Gets the half angle measured from the principal direction and in the direction of the y-axis.protected voidonRadiusChanged()voidsetXHalfAngle(double value)Sets the half angle measured from the principal direction and in the direction of the x-axis.voidsetYHalfAngle(double value)Sets the half angle measured from the principal direction and in the direction of the y-axis.-
Methods inherited from class agi.foundation.geometry.shapes.SensorFieldOfView
getProjection, getRadius, getService, setRadius
-
-
-
-
Constructor Detail
-
RectangularPyramid
public RectangularPyramid()
Constructs a volume with a default definition, in which theXHalfAngle(get/set) and theYHalfAngle(get/set) are equal toConstants.HalfPiradians.
-
RectangularPyramid
public RectangularPyramid(double xHalfAngle, double yHalfAngle)Constructs a volume of infinite radius with the provided parameters.- Parameters:
xHalfAngle- The half angle measured from the principal direction and in the direction of the x-axis.yHalfAngle- The half angle measured from the principal direction and in the direction of the y-axis.
-
RectangularPyramid
public RectangularPyramid(double xHalfAngle, double yHalfAngle, double radius)Constructs a volume of limited radius with the provided parameters.- Parameters:
xHalfAngle- The half angle measured from the principal direction and in the direction of the x-axis.yHalfAngle- The half angle measured from the principal direction and in the direction of the y-axis.radius- The radial limit of the volume. This is the maximum range at which the sensor can detect a target.
-
-
Method Detail
-
getIsConnected
public boolean getIsConnected()
Gets a value indicating whether the figure is connected.- Specified by:
getIsConnectedin classFigure
-
onRadiusChanged
protected void onRadiusChanged()
- Overrides:
onRadiusChangedin classSensorFieldOfView
-
getXHalfAngle
public final double getXHalfAngle()
Gets the half angle measured from the principal direction and in the direction of the x-axis.- Throws:
ArgumentOutOfRangeException- Thrown when the half angle is less than or equal to zero or greater thanConstants.HalfPiradians.
-
setXHalfAngle
public final void setXHalfAngle(double value)
Sets the half angle measured from the principal direction and in the direction of the x-axis.- Throws:
ArgumentOutOfRangeException- Thrown when the half angle is less than or equal to zero or greater thanConstants.HalfPiradians.
-
getYHalfAngle
public final double getYHalfAngle()
Gets the half angle measured from the principal direction and in the direction of the y-axis.- Throws:
ArgumentOutOfRangeException- The half angle must be greater than zero and less than or equal toConstants.HalfPiradians.
-
setYHalfAngle
public final void setYHalfAngle(double value)
Sets the half angle measured from the principal direction and in the direction of the y-axis.- Throws:
ArgumentOutOfRangeException- The half angle must be greater than zero and less than or equal toConstants.HalfPiradians.
-
encloses
public boolean encloses(@Nonnull Cartesian point)
Indicates if the provided point is inside the volume.The
pointparameter must be expressed in the same coordinate frame that the volume is defined in.
-
getEnclosureDescriptions
public EnclosureDescriptionCollection getEnclosureDescriptions()
Gets the list of descriptions for the enclosure functions for this solid.- Specified by:
getEnclosureDescriptionsin classSolid- Returns:
- The list of enclosure descriptions.
-
getProjection
public SensorProjection getProjection(Ellipsoid ellipsoid, @Nonnull KinematicTransformation ellipsoidToSensorTransformation, SensorProjectionOptions projectionOptions)
Gets the projection of the sensor onto the front surface of a specified ellipsoid and onto a plane at a specified distance in space.- Specified by:
getProjectionin classSensorFieldOfView- Parameters:
ellipsoid- The ellipsoid on which the sensor is to be projected.ellipsoidToSensorTransformation- The transformation from the reference frame of the ellipsoid to the reference frame of the sensor.projectionOptions- The options controlling how the sensor is projected, ornullto use defaults.- Returns:
- The sensor projection.
-
-